
Vezérléstechnika

A vezérléstechnika egy mérnöktudomány, amely a technológiában előforduló szabályozási folyamatokkal foglalkozik. Matematikailag kezelik a rendszerelméletben (mérnöki tudományok) , amely a mérnöki tudományok interdiszciplináris tudományága .
A műszaki ellenőrzés folyamat célzott befolyásolása fizikai, kémiai vagy egyéb változók a műszaki rendszerek . Az úgynevezett szabályozott változók még a rendellenességeknek való kitettség esetén is a lehető legállandóbbak maradnak (a rögzített értékek szabályozása befolyásolja), vagy úgy, hogy előre meghatározott időbeli változást követnek ( szekvenciavezérlés ).
A szabályozás elve a referenciaváltozó névleges és tényleges értéke a negatív visszacsatolású mért szabályozott változóval. A szabályozó eltérés (a vezérlési eltérés ) és a megadott vezérlési paraméterek által manipulált változó által meghatározott vezérlő . Ez befolyásolja a szabályozott rendszert, mint vezérlőváltozót, és az eltérést minimálisra csökkenti a zavaró változók ellenére, és a kiválasztott minőségi kritériumoktól függően a kívánt időzítést feltételezi.
A háztartásban jól ismert alkalmazások a szobahőmérséklet állandó szabályozása ( fűtésszabályozás ), a hűtőszekrényben lévő levegő vagy a vasaló . A sebességtartó automatika , a haladási sebesség a gépjármű állandó. A nyomon követés általában technikailag megterhelőbb, például a pályavezérlés autopilot segítségével a hajózásban , a légi közlekedésben vagy az űrutazásban , vagy egy mozgó objektum célkövetése .
Ez a fő elemvezérlési technológia nagyjából a vezérléstechnika széles skáláját nyújtja, a cikkek hurokra , vezérlőkre , vezérlőrendszerre és másokra hivatkozva.
A vezérléstechnika története
Az emberek foglalkozása a vezérléstechnikával a Kr.e. 3. század között kezdődött. És az I. század az ókori Görögországban . A visszacsatolás elve, amelyen egy rendelet alapul , nem emberi találmány, hanem egy természetes jelenség , amely mindig is előfordult . Modern ellenőrzési technológia kezdődött idején az ipari forradalom a mechanikai alkatrészeket. Legnagyobb előrehaladásukat az elektronika fejlődése és végül az elektronikus számítástechnika tette lehetővé .
A szabályozás és ellenőrzés magyarázata és meghatározása
Vonatkozó szabványok
A szabályozás mellett a vezérlésnek is nagyon fontos szerepe van az automatizálási technológiában. A szabályozás és szabályozás szabványosításának történetéhez részletesebb információk találhatók a Vezérléstechnika cikkben .
Az "IEC 60050-351 Nemzetközi Elektrotechnikai Szótár - 351. rész: Vezérléstechnika " szabvány meghatározza a vezérléstechnika alapvető feltételeit, beleértve a folyamatot és a menedzsmentet , valamint tartalmazza a szabályozást és a szabályozást. Németországban felváltja a DIN IEC 60050-351 és DIN V 19222: 2001-09 szabványokat. A korábban érvényes DIN 19226 szabvány a szabályozás és az ellenőrzéssel kapcsolatos kifejezések meghatározására 2002 óta nem érvényes.
Az angol nyelvű szakirodalomban az angol control (a folyamat) vagy a controller (hardver implementáció) szót differenciálatlanul használják mind a szabályozáshoz, mind a vezérléshez . Ezt a kifejezést többnyire ellenőrzésnek fordítják. A kontextus ismerete tehát szükséges a helyes fordításhoz. Ha vezérléstechnikát alkalmaznak, egyértelműen a vezérléstechnikát értjük.
A szabályozás fogalmának meghatározása
A DIN IEC 60050-351 szabvány a vezérlés kifejezés következő meghatározását tartalmazza :
- A szabályozás vagy szabályozás olyan folyamat, amelyben egy változót, a szabályozott változót folyamatosan rögzítik, összehasonlítva egy másik változóval, a referenciaváltozóval, és befolyásolják a referenciaváltozó kiigazításának értelmében.
- A vezérlés jellemzője a zárt akciósorozat, amelyben a szabályozott változó folyamatosan befolyásolja magát a vezérlőhurok akcióútjában.
A rendelet kifejezés kiterjesztett magyarázata
A fenti meghatározás az egyhurkos egyváltozós vezérlés cselekvési tervén alapul, mivel ez a gyakorlatban leggyakrabban előfordul. Ez magában foglalja az egyedi változókat, például a kontrollváltozót , a kontrollváltozót és a névtelen, a referenciaváltozóba visszamenőleg mért változót , a kontrollváltozót és a zavarokat , amelyek időben változó méreteknek tekintendők.

A szabályozott változót tényleges értékként méri egy mérőelem, és ezt összehasonlítja a referenciaváltozóval ( alapjel ) . A vezérlési eltérést, mint az alapjel és a tényleges érték közötti különbséget a vezérlő betáplálja, amely ennek segítségével manipulált változót hoz létre a vezérlőhurok kívánt időbeli viselkedése (dinamikája) alapján . A hajtómű lehet a vezérlő része, de az esetek többségében önálló eszköz.A zavarváltozó befolyásolja a szabályozott változót a szabályozott rendszerben vagy annak részeiben.






A rendszer eltérésének (vagy rendszerszintű eltérésének) tervezett minimalizálása érdekében a rendszer eltérésének polaritása nem csak a referenciaváltozótól függ , hanem a szabályozott rendszer (közvetlen vagy fordított) működésétől is.
A pozitív szabályozási eltérés csak akkor vezet a szabályozott változó pozitív növekedéséhez a szabályozó erősítésén keresztül, ha a szabályozott rendszer pozitív szabályozási értéket igényel a szabályozás eltérésének csökkentéséhez. Ha ez egy ellenőrzött rendszer z. B. fűtőberendezés, a pozitív kontrollérték emelkedő hőmérséklethez vezet. Az ablaknyitás, a napsugárzás vagy a szélsebesség okozta hűtési hatások külső zavarok. Ha a vezérelt rendszer z. B. a hűtőegység pozitív szabályozási értéke (azaz a kompressziós hűtőgép bekapcsolása ) a hőmérséklet csökkenéséhez vezet. Ilyen esetet a vezérlőhurok tömbvázlata a manipulált változó előjel -megfordításával jellemez.
Ellenőrzési elvek
A DIN IEC 60050-351 szabvány a vezérlés kifejezés következő meghatározását tartalmazza :
- A vezérlés , a vezérlés annak köszönhető, hogy a rendszerszabályok sajátosságai befolyásolják egy olyan rendszer működését, amelyben egy vagy több változó bemeneti változóként, más változók kimeneti vagy vezérlő változóként működnek.
- A vezérlés jellemzője vagy a nyitott cselekvési út, vagy egy ideiglenesen lezárt cselekvési út, amelyben a bemeneti változók által befolyásolt kimeneti változók nem működnek folyamatosan, és nem hatnak újra önmagukra ugyanazon bemeneti változók révén.
Az ellenőrzések cselekvési tervével a szabályozott változó mérőelemén keresztül végzett visszacsatolás nem vonatkozik a szabályozás cselekvési tervére. A referenciaváltozó a vezérlőeszközön keresztül egy manipulált változót képez, amely a vezérlő útvonalon keresztül közvetlenül meghatározza a kimeneti változót.

Ha a vezérelni kívánt változó kívülről zavartalan marad , a tiszta vezérlés hiba nélkül működik, ha a vezérlőút jól ismert. Ha a zavarok mérhetők, akkor megfelelő intézkedésekkel kompenzálhatók. Például egy fűtőberendezés energiaellátása, amelyben csak a fűtőközeg előremenő hőmérsékletét szabályozzák az ingadozó külső hőmérséklet ellen, nyitott szabályozás. Ha kinyit egy ablakot a helyiségben a hideg külső környezetre, a zavar hatással van a szoba hőmérsékletére, és ez csökken. A szabályozáshoz meg kell mérni, és vissza kell vezetni egy vezérlőeszközbe.
Az ábrán látható cselekvési terv egy vezérlőrendszert mutat be, amely a vezérlőberendezés és a vezérlőút nyitott lánca. Ha egy zavarváltozó domináns és ismert és mérhető, akkor a vezérlés második ágát jelentő előrejelző zavarjelző változó használható (az ábra felső blokkja).
A szabályozás előnyei és hátrányai a kontrollokhoz képest
A szabályozás előnyei:
- Egy folyamatban az egy méretű zavarok gyakran ismeretlenek méret és időzítés szempontjából, ezért nem rögzíthetők. A vezérlőhöz képest ez az alapvető előnye annak a szabályozásnak, amellyel a változót megközelítőleg a kívánt értéken tartják a zavarok hatása ellen, anélkül, hogy a zavarokat ismernék.
A szabályozás hátrányai:
- A szabályozás technikailag összetettebb és drágább, mint a vezérlés, mert a vezérlőváltozót szabályozott változóként méri, és egy megfelelő vezérlővel kell meghatároznia a manipulált változót. A szabályozás csak akkor előnyös, ha a zavaró változók hatása elviselhető, és nincsenek magas követelmények a vezérlő változó pontosságára és állandóságára.
- A vezérlőhurkot nemkívánatos okok okozhatják, z. B. az öregedés és a kopás okozta paraméterváltozások instabillá válnak.
- A „ próba és hiba ” elvén alapuló heurisztikus optimalizálási eljárások és javítások gyakran nem elegendőek. Szakképzett szakemberekre van szükség.
A vezérlők előnyeit és hátrányait a Vezérléstechnika cikke írja le .
A szabályozás és ellenőrzés technikai végrehajtása

A bemeneti és kimeneti változók, valamint azok vezérlő vagy szabályozó rendszerben történő feldolgozása analóg vagy digitális technológia segítségével valósítható meg. Ma az analóg rendszereket nagyrészt digitális rendszerek váltják fel, amelyek az Ipar 4.0 értelmében távirányítással , távoli karbantartással és hálózatépítéssel támogatják az automatizálást , és általában költséghatékonyabbak a gyártásukban. Különleges esetekben pneumatikus vagy egyszerű mechanikus vezérlőket használnak.
A szerkezettől és a rendeltetéstől függően megkülönböztethetők:
- Ipari vezérlő: gépi szintű egyéni vezérlők kis rendszerekhez saját mikroprocesszorral
- Folyamatvezérlő eszközök: Bővíthető ipari vezérlők interfésszel egy magasabb szintű (vezérlő) rendszerhez
- Univerzális vezérlő: Folyamatvezérlő bővítőkártyák vagy szoftvervezérlő modulok formájában a programozható vezérléshez
- Ipari vezérlő: Speciális folyamatvezérlők, amelyek bizonyos alkalmazási területekre vannak optimalizálva
Analóg technológia
Az analóg jelek értékben és időben folyamatosak, ezért fokozatmentes és tetszőlegesen finom görbékkel rendelkeznek. A jelfelbontás határait parazita jelzaj -komponensek adják meg. Ha árnyékoló intézkedéseket és jelszűrőket használnak, a jelfelbontás javítható. A vezérlési vagy szabályozási beavatkozás folyamatosan, késlekedés nélkül történik, és ezért rendkívül dinamikus vezérlőhurkokhoz is alkalmas.
Az analóg vezérlőrendszerek többnyire analóg elektronikán alapulnak, műveleti erősítőkkel és analóg szorzókkal az alapvető számtani műveletekhez. A referenciaváltozó specifikációját és a vezérlő beállítási értékeit általában potenciométerek segítségével valósítják meg. Ritka esetekben pneumatikus szabályozókat is használnak.
Digitális technológia
A digitális rendszerek szakaszos lefolyásúak, a mért értékek diszkrét értékei és a meghatározott mintavételi gyakorisággal frissített módosított változók . A ma rendelkezésre álló technológiákkal a rendszerméret felbontása és a rendelkezésre álló számítási teljesítmény is olyan magas, hogy az analóg rendszerek teljesítménye szinte minden alkalmazásban meghaladja, és még költséghatékonyabban is megvalósítható bonyolultabb rendszerekben. Továbbra is fennáll azonban a nem észlelt szoftverhibák rendszerszintű kockázata, amelyek helytelen vagy katasztrofális következményekkel járhatnak.
A programozható logikai vezérlők (PLC) a bináris bemeneti jeleket bináris kimeneti jelekké dolgozzák fel a digitális aritmetikai egységen keresztül . A számtani egységet egy program vezérli, amelyet memóriákban tárolnak.
A programozható logikai vezérlők moduláris felépítésűek, és sok gyártó kínálja őket. Segítségével egyszerű kapcsolási mechanizmusokat valósíthat meg a kombinatív és szekvenciális viselkedéshez az egymást követő funkcionális szekvenciákhoz ( szekvenciavezérlők ). A szekvenciális folyamat visszacsatolással kapcsolható össze, mint a vezérlési folyamat befejezett megerősítése, és így egy ideiglenesen lezárt vezérlésnek felel meg. Digitális vagy analóg alrendszerek is integrálhatók. Az analóg mért értékeket időben diszkrét módon mintavételezik, és analóg- digitális konverterek segítségével diszkrét digitális értékekké alakítják át. A digitális kimeneti jelek feldolgozhatók digitális-analóg átalakítókkal vagy impulzusszélesség-modulációval az analóg működtetőknél. A léptetőmotorokat közvetlenül vezérlik.
A vezérlőberendezések befolyásolják a vezérelt rendszert vagy egy technikai folyamatot olyan kezelőelemeken keresztül, mint például jeltovábbítók (kapcsolók, gombok , billentyűzet) olyan vezérlőfunkciókkal, mint a kapcsolás, számlálás, időösszehasonlítók és tárolási folyamatok, valamint időszekvencia -funkciók. Ha a fizikai analóg mennyiségeket figyelik vagy szabályozzák, akkor a megfelelő érzékelőkre van szükség. Sürgős beavatkozásokra is szükség lehet a folyamat automatikus leállításához, néha rendezett leállítással.
A folyamatfolyamat a vezérlési útvonalon vagy annak kilépésein belül zajlik. A folyamatra mindenféle hajtómű és hajtómű ( motorok , szelepek , szivattyúk , szállítószalagok , kontaktorok ), hidraulikus és pneumatikus elemek, tápegység, vezérlők hatnak. A kimeneti jelek a folyamat nyomon követésére vonatkoznak, és jelzőlámpák, alfanumerikus kijelzők, hibaüzenet -panelek, akusztikus jelgenerátorok, naplófelvevők stb. Használatával valósulnak meg.
A digitális vezérlési és szabályozási technológia alkalmazási területei például az ofszet forgógépek nyomtatott termékekhez, a vegyipari és atomerőművek automatizálása .
A digitális technológia és a hálózatépítés növeli a katasztrofális programhibák és az ellenőrizhetetlen helyzetek kockázatát , mint pl B. a Boeing 737 Max két lezuhanása esetén , a Manőverezési Karakterisztika Kiegészítő Rendszer (MCAS) gyengeségei miatt. A technikai folyamatokat támadhatják a kibertámadások , például a Stuxnet számítógépes féreg iráni centrifugákon az urándúsítás érdekében.
Egyéb felismerések
A nagyon egyszerű mechanikus szabályozók nem igényelnek segédenergiát. A vasaló bimetál termosztátja bezárja a fűtőberendezés elektromos érintkezőjét mindaddig, amíg a célhőmérséklet nem éri el. Ezután a mérés késése és az érintkező kapcsolási hiszterézise miatt kvázi időszakos be- és kikapcsolás következik be, amelyben a vasalási felület hőmérséklete néhány Kelvin eltéréssel az alapjel körül ingadozik.
A pneumatikus szabályozók sűrített levegőt igényelnek kiegészítő energiaként. Főként robbanásvédelmet igénylő alkalmazásokban használják, és el kell kerülni a szikrák kockázatát.
- Példák vezérlő és szabályozó eszközökre (1788-2016 időszak)

Boulton & Watt gőzgép centrifugális kormányzója (1788)

A Honeywell T86 termosztátja , Henry Dreyfuss tervezte (1953)

Pneumatikus PID szabályozó Telepneu a Siemens & Halske cégtől (kb. 1960)

Idővezérelt flexostat szobahőmérséklet- szabályozó , Sauter (1967)

Digitális vezérlőegység az MAN csuklós busz aktív csuklózárjához (1986)

Modular PLC Simatic S7-1500 a Siemens-től (2012)

Moduláris PLC vezérlésLogix of Allen-Bradley (2013)

Kompakt PLC kis vezérlőkhöz Logo! Siemens (2016)





.jpg)



Eszközök a gyors prototípus -készítéshez a kutatás -fejlesztésben
Az új ellenőrzési koncepciók rendszeres tesztelésének problémája felmerül a kutatás -fejlesztésben. Az alábbiakban felsoroljuk a számítógépes elemzéshez, a tervezéshez és a gyors vezérlés prototípus-készítéséhez , valamint a vezérlőrendszerek szimulációjához szükséges legfontosabb szoftvereszközöket .
- MATLAB és Simulink , The MathWorks
- Számos eszköztárnak köszönhetően egy nagyon kiterjedt szoftvercsomag a numerikus matematikához, amely alkalmas szimulációra, rendszerazonosításra, vezérlőtervezésre és gyors vezérlő prototípus -készítésre (kereskedelmi)
- Scilab , National Institute of Recherche en Informatique et en Automatique (INRIA)
- Szintén nagyon kiterjedt szoftvercsomag a numerikus matematikához, hasonló koncepcióval és szintaxissal, mint a MATLAB, alkalmas szimulációra, rendszerazonosításra és gyors vezérlésű prototípus -készítésre (ingyenes)
- CAMeL-View TestRig
- Fejlesztési környezet a fizikai rendszerek modellezésére, a vezérlőtervezésre és a gyors vezérlő prototípusokra összpontosítva, valamint a tesztállványokhoz való csatlakozáshoz (kereskedelmi)
- Juharfa
- Számítógépes algebrai rendszer (CAS), elsajátítja a numerikus és szimbolikus matematikát, különösen alkalmas a nemlineáris vezérlés egyes tervezési módszereire (kereskedelmi)
- Mathematica , Wolfram Research, Inc.
- Átfogó szoftvercsomag numerikus és szimbolikus matematikához (kereskedelmi)
- dSPACE
- Integrált hardver és szoftver megoldások a MATLAB tesztállványokhoz való csatlakoztatásához (kereskedelmi)
- LabVIEW , National Instruments (NI)
- Integrált hardver és szoftver megoldások a tesztállványok számítógépes vezérléséhez (kereskedelmi)
- ExpertControl
- Szoftvermegoldások a teljesen automatikus rendszer-azonosításhoz és a teljesen automatikus, modell-alapú vezérlőtervezés a klasszikus vezérlőszerkezetekhez (PID-vezérlők), valamint a magasabb rendű rendszerek vezérlőstruktúrái (kereskedelmi)
- TPT
- Szisztematikus tesztelő eszköz vezérlőrendszerekhez, amely a szimuláción kívül eredményértékelési és elemzési lehetőségeket is kínál.
A felsorolt eszközök mindegyike nagyfokú rugalmasságot mutat az alkalmazás és a használható vezérlőszerkezetek tekintetében.
Műszaki alkalmazások


- Vasúti technológia
- A hajtásvezérlésben számos vezérlési probléma esetén meg kell határozni például a nyomatékot és a fordulatszámot. A homályos vezérlést sikeresen alkalmazták a Sendai metrón .
- repülés
- Vezérlési problémák jelentkeznek a repülőgépek számos alkatrészében, például a turbinákban, de a repülési dinamikával kapcsolatban is. A repülésdinamika -vezérlési problémákra példa a dőlés, az elfordulás és a dőlésszög vezérlése, valamint az autopilot . Lásd még a repülésvezérlőket .
- Energia technológia
- Pozíció szabályozása egy szabályozó szelep a működtető egy vezérlő kaszkádot . A tápegység hálózatában a feszültséget és a frekvenciát hálózatonként kell tartani. Minden erőműben a feszültséget és a frekvenciát helyileg szabályozzák, így a feladatot decentralizált vezérlőkkel oldják meg a vezérlő teljesítmény változtatásával (lásd még erőmű ). Globálisan csak az egyes erőművek teljesítmény -alapértékei vannak megadva.
- Gépjárműmérnökség
- A sebességtartó automatika és a blokkolásgátló fékrendszer (ABS), de az elektronikus stabilitási program (ESP) is jól ismert kezelőszervek a járműszektorban, amelyeket vezetéssegítő rendszereknek is neveznek . A belső égésű motorok számos vezérlőhurkot is tartalmaznak, például üresjárati fordulatszám, levegő arány (lásd még lambda szonda ), ütésszabályozás (lásd még kopogás (belső égésű motor) ). A modern automata sebességváltók váltóváltáskor vezérlőhurokat igényelnek a szinkronizáláshoz.
- Elektromos hajtás
- Az elektromos hajtású járművekben nagyobb teljesítményű elektromos motorokat használnak. Ezeket fordulatszám- és nyomatékvezérléssel vezérlik, hibrid járművekben, a belső égésű motorral kapcsolatban is.
- csővezeték
- A csővezetékekben főként hálós szabályozók vannak az áramláshoz , a nyomásszabályozáshoz (bemeneti nyomás, kimeneti nyomás ) és a helyzetszabályozáshoz, beleértve a határérték -szabályozást .
- robotika
- A gyártás automatizálásában a termelési robotok tengelyeit kell elhelyezni. Itt különösen fontos szerepet játszik a gyors leülepedési idő és a legkisebb túllépés.
- folyamattechnológia
- A folyamattechnikában olyan kémiai és fizikai paramétereket szabályoznak, amelyek szerepet játszanak a vizsgált folyamatban. Ilyen például a kevert tartályreaktor szintjének, hőmérsékletének, pH -értékének és oxigéntartalmának szabályozása, vagy az anyag- vagy ionkoncentrációk állandó tartása kemosztáttal .
- Vízgazdálkodás
- Az árvizek elkerülése és a vízellátás biztosítása érdekében fontosak a gátak láncainak alárendelt szabályai . Az egyes tartályok feltöltési szintjét egy magasabb szintű menedzsment határozza meg, és helyben szabályozzák.
Vezérlőhurok tervezési stratégiák
A szabályozó feladata , hogy a szabályozott változót a lehető legközelebb közelítse a referenciaváltozóhoz, és minimalizálja a zavaró változók hatását. A referenciaváltozó rögzített alapjelként, programvezérelt alapjel specifikációként vagy folyamatos, időfüggő bemeneti jelként, a szabályozott változó speciális követési tulajdonságaival tervezhető.
A túl nagy hurokerősítés , amely nem igazodik a szabályozott rendszerhez , oszcillációs instabilitáshoz vezethet a több késleltető elemmel rendelkező, vagy akár holtidőbeli viselkedésű szabályozott rendszerekben . A szabályozott rendszer időkésleltetése miatt a szabályozási különbség késleltetéssel kerül a vezérlőhöz a beállított-tényleges érték-összehasonlítás révén. Ez a késleltetett eltolás a szabályozott változóban pozitív visszacsatolást okozhat a negatív visszacsatolás helyett az alapjel / tényleges érték összehasonlításakor, és ez instabillá teszi a zárt vezérlőkört, és állandó rezgéseket hoz létre.
Vezérlőhurok tervezési stratégiák lineáris rendszerekhez
A lineáris rendszerek vezérlőhurkainak tervezési stratégiái az adott zárt vezérlőhurok statikus viselkedésének és időbeli viselkedésének optimalizálására vonatkoznak. Minél kisebb például a szabályozott rendszer időkésleltetése, annál nagyobb az úgynevezett hurokerősítés és ezáltal a szabályozó erősítése is kiválasztható, ami javítja a vezérlés statikus pontosságát.
A nagy hurokerősítés szintén dinamikusan gyorsítja a vezérlőhurkot, de a gyakorlatban csak korlátozott mértékben valósítható meg, mert a manipulált változó technikai leállások vagy energiahiány miatt nem nőhet korlátlanul. Az alacsonyabb szabályozóerősítés a vezérlő egy időben integrált komponensével kapcsolatban pontosabbá és stabilabbá teszi a szabályozó hurkot minden statikus behatásra, de lassabb is. Ebből a célból egy optimalizált kompromisszumos megoldást kell találni egy megfelelő tervezési stratégia alkalmazásával. Ennek felméréséhez definiálták a vezérlési minőség kifejezést, amely lehetővé teszi a szabályozott változó elkerülhetetlen, időszakosan csillapított átmeneti válaszának becslését a magasabb rendű vezérlőrendszerekben lévő vezérlőhurokban.
Vezérlőhurok tervezési stratégia vegyes lineáris és nemlineáris rendszerekhez
A vegyes lineáris és nemlineáris rendszerek tervezési stratégiája bonyolultabb, és olyan modellekhez kapcsolódik, mint: B. a Hammerstein-modell , amelyben a statikus nem-linearitás kölcsönhatásba lép egy dinamikus lineáris rendszerrel. A megszakított nemlineáris statikus vezérlők viselkedése lineárisan vezérelt rendszerekkel kapcsolatban a harmonikus egyensúly módszerrel kezelhető.
A nem lineáris és lineáris komponenseket tartalmazó vezérlőhurkok vezérlői ésszerűen kezelhetők numerikus matematikával, különösen modern szimulációs eszközökkel , például a személyi számítógépekhez (PC).
Különféle elméleti és kísérleti elemzési módszereket és matematikai tervezési módszereket használnak a szabályozott rendszer és a vezérlő rendszer viselkedésének meghatározására. A matematikai kezelés alapjai és a vezérléstechnika speciális eljárásai a következő fejezetekben találhatók.
Kétváltozós szabályozás példaként a többváltozós rendszerekhez

Elvileg a szabályozott rendszer többváltozós rendszerként történő szabályozása hasonló az egyváltozós rendszerhez. Ez megköveteli a kapcsolóelemek elemzését, és ezáltal nagyobb matematikai erőfeszítést igényel a vezérlőhurok kialakításához. A többváltozós vezérlés jellemzője, hogy egyetlen manipulált változó, mint a vezérelt rendszer bemeneti változója, mindig több kimeneti változót (szabályozott változót) befolyásol (itt a G21 és G12 tényezőkön keresztül ). Ha egy klímaberendezésnek állítólag szabályoznia kell a hőmérsékletet és a relatív páratartalmat az alapértékekhez, a fűtésbe való beavatkozás a hőmérséklet emelkedéséhez és - fizikai okokból - a relatív páratartalom csökkenéséhez vezet . A párásító berendezés beállítása a páratartalom növelésére csökkenti a légkondicionált helyiség hőmérsékletét is . A vezérlési beavatkozást a leválasztó vezérlőn keresztül optimalizálják, így a hőmérséklet növekedésével egyidejűleg több nedvesség kerül be ( GR21 tényező ).




Példa az épület fűtésszabályozására
A szabványos vezérlőáramkör egyszerű, szemléltető példájaként a melegvizes központi fűtési rendszeren alapuló helyiséghőmérséklet -szabályozás és annak berendezési elemei szolgálnak itt.
A gázkazánok, olajkazánok és szilárd tüzelőanyaggal működő kazánok többnyire fosszilis tüzelőanyagok elégetéséből nyerik a hőenergiát, és a hőenergiát a hőhordozó vízen keresztül szállítják. Az égéskamrával fűtött kazán fűtőpumpa segítségével radiátorokkal és / vagy padlófűtéssel ellátott melegvízkörhöz csatlakozik .
A radiátor hőellátása konvekció és sugárzás révén felmelegíti a környező helyiség levegőt. A hőenergia a radiátor és a szobahőmérséklet közötti hőmérséklet -gradienssel a külső hőmérséklet méretétől függően az ablakokon, ajtón, a helyiség falain és a külső szigetelésen keresztül áramlik a külső időjárásnak.
Decentralizált szobahőmérséklet -szabályozás
Az épületbe leadott hőmennyiséget a kazán előremenő és visszatérő hőmérséklete és a víz áramlási sebessége közötti különbség adja. Az épület helyiségeiben lévő összes radiátornak azonos az előremenő hőmérséklete, amelyet általában a külső hőmérsékletnek megfelelően szabályoznak. A radiátorok minden szobában termosztatikus szelepekkel vannak felszerelve.
A radiátor mérete a helyiség méretéhez igazodik. A meglévő külső hőmérséklethez szükséges előremenő hőmérsékletet külső hőmérséklet -érzékelő rögzíti és szabályozza. A jellegzetes mezőből választható fűtési jellemzők figyelembe veszik az épületek eltérő hőigényét, és így a külső hőmérséklet és az előremenő hőmérséklet közötti kapcsolatot. A cél az, hogy a helyiség hőmérsékletét szabályozott változóként automatikusan a kívánt alapértéken tartsák egy termosztatikus szelep segítségével .
A fűtőtesten elhelyezett termosztatikus szeleppel a szoba kívánt hőmérsékletét beállíthatja úgy, hogy a termosztátot egy skála tartományon belül elforgatja. A termosztatikus szelep érzékelője méri az aktuális szobahőmérsékletet (théta), és megváltoztatja a melegvíz áramlási sebességét a radiátoron keresztül, és ezáltal a helyiségbe szállított hőmennyiséget a szelepálláson keresztül ( működtető ). A termosztatikus szelepnek arányos szabályozási viselkedése van (P szabályozó), amely kissé lassan reagál a zavaró változókra, amikor az alapérték és a tényleges érték közötti eltérés alacsony külső hőmérsékleten növekszik.

A decentralizált helyiséghőmérséklet -szabályozáshoz, valamint a referencia -nappalival ellátott központi épülethőmérséklet -szabályozáshoz a korszerű fűtési rendszerekre vonatkozik a modulálható, a hőenergia -termelés állandó viselkedésével rendelkező égő használata. Ez az égő például folyamatosan változtathatja hőenergiáját az igényektől függően kb. 10% és 100% között. Az égő állandó viselkedési területét fűtési technológia szempontjából modulációs foknak nevezzük.
A gázzal működő kondenzációs kazánok képesek elszívni és felhasználni a füstgázokban található összes hőt.
A szakaszos be- és kikapcsolással működő fűtési rendszerhez képest a moduláris égőhöz a következő előnyök társulnak:
- Alacsony termodinamikai anyagterhelés az égőkamrában,
- Az égőzajok csökkentése és a tágulási repedési zajok elkerülése a csővezetékekben és
- Az üzemanyag megtakarítása.
Az égő inkonzisztens területe alatt szakaszosan működik, jelentősen csökkentett hőigénnyel.
A referencia nappali fő vezérlője
A termosztátos szelepekkel ellátott nappalik decentralizált hőmérséklet-szabályozása mellett a modern fűtési rendszerekben referencia-nappali (szintén kísérleti szoba, ólomszoba, legnagyobb nappali) van kialakítva, amelyben egy központi, kiváló minőségű fő vezérlőegység található. szobahőmérséklet alapjel -generátor és egy referencia szobahőmérséklet -érzékelő beállítja az előremenő hőmérsékletet az épület központi melegvíz -körére, és szabályozza a referencia -helyiség hőmérsékletét.
A hőmérsékleti különbségek a radiátorok és a hűvösebb helyiséglevegő között légmozgásokat ( konvekció ) és kisebb mértékben sugárzó energiát generálnak , amelyek az érzékelőre hatnak. A szabályozó az égő bekapcsolásával szükség szerint növeli az előremenő hőmérsékletet, vagy ha szükséges, csökkenti az égő kikapcsolásával.
A szoba szerkezeti körülményei és a berendezések, például a radiátorok és a helyiséghőmérséklet mérési helyétől való távolság szintén meghatározóak a szobahőmérséklet szabályozásának minősége szempontjából. Hosszú helyiségben nem lehet elvárni, hogy a 10 cm távolságra lévő termosztáttal ellátott radiátor egyenletes szobahőmérsékletet állítson be az egész helyiségben. Másrészt a radiátor és a szobahőmérséklet mérési pontja közötti nagy távolság azt jelenti, hogy a jel terjedési ideje hosszabb ( holtidő -viselkedés ).
Általános gyakorlat, hogy az érzékelőt a referencia nappaliban, a radiátor szintjének ellentétes falára szerelik fel. Az érzékelő a levegő hőmérsékletét méri, nem a belső fal hőmérsékletét. A referencia -nappali radiátorok nem rendelkeznek termosztatikus szelepekkel.
A vezérlőhurok alkatrészeinek és jeleinek megnevezése
Megjegyzés:
- A német szakirodalomban a vezérléssel kapcsolatos jeljelölések nem mindig az érvényes DIN szabványokból származnak, de bizonyos esetekben valószínűleg a dinamikus rendszerek jeláramlási terveinek ábrázolásaiból származnak az állapottérben. Ez az elmélet, amelyet Rudolf Kálmán matematikus és Stanford egyetemi tanár az USA -ból ered , és a hozzá kapcsolódó jelzések az 1960 -as évek óta változatlanok.
- A vezérléstechnikával foglalkozó egyes szakkönyvek az X A (kimeneti változó) és az X E (bemeneti változó) jelöléseket is tartalmazzák az átviteli rendszerek jelbemeneteinek és jelkimeneteinek ábrázolására .

| leírás | Jelek, mint az állapot -térrendszerekben | Szimbólum a DIN IEC 60050-351 szerint |
Jelentés általában és a példában (szobahőmérséklet -szabályozás termosztatikus szeleppel) |
|---|---|---|---|
| Vezérelt rendszer | G S (ek) |
|
|
| Zavarás | d | z |
|
| Vezérelt változó | y | x |
|
| jelenlegi érték |
|
||
| Mérőelem |
|
||
| Mérhető | y M | y M |
|
| Referencia változó | w | w |
|
| Alapjel |
|
||
| Kontroll eltérés |
e = w - y |
e = w - x |
|
| Szabályozó | G R (s) |
|
|
| Hajtómű |
|
||
| A vezérlő által manipulált változó | u R | y R. |
|
| Manipulált változó | u | y |
|
A hőenergia meghatározása
Köznyelven a hőenergiát némileg pontatlanul „hőnek” vagy „hőenergiának” nevezik. Az anyag hőenergiáját úgy határozzuk meg


hol van a fajlagos hőkapacitás , a tömeg és az abszolút hőmérséklet . Ez a definíció feltételezi, hogy az anyag fizikai állapotán belül van . Víz esetén a folyékony állapot 0 (+) ° C és 100 (-) ° C közötti hőmérséklettartományban érvényes normál nyomáson, tengerszinten .



A hőellátás növeli a molekulák átlagos mozgási energiáját, és így az anyag hőenergiáját, a hőelvezetés pedig csökkenti.
Ha két különböző hőmérsékletű hőenergia -rendszer találkozik, akkor hőmérséklete hőcserén keresztül kiegyenlítődik. Ez a beállítás addig történik, amíg a rendszerek között nincs többé hőmérséklet -különbség. Ezt a folyamatot hőátadásnak nevezik .
További segítség ( energia ) nélkül a hőenergia soha nem vihető át az alacsonyabb hőmérsékletű rendszerből a magasabb hőmérsékletű rendszerbe.
A hőáramlás vagy hőáramot egy fizikai mennyiség kvantitatív leírását hőátadási folyamatok.
A fizikában és az anyagtudományban a határfelület vagy fázishatár a két fázis (itt a fázis = az anyag térbeli területe, a homogén anyag összetétele és sűrűsége) közötti terület. Az interfészek a folyékony és szilárd, folyékony és folyékony, szilárd és szilárd, valamint szilárd és gázfázisok közötti területek.
Alternatív folyamatos és nem folyamatos szabályozás
A referencia szobahőmérséklet kétféle módon szabályozható folyamatos vagy nem folyamatos szabályozásként:
A külső hőmérséklet változását általában statikus zavarváltozónak kell tekinteni, mivel az időreakció nagyon lassú az előremenő hőmérséklet változásához képest. A fűtésszabályozó csak akkor tud reagálni, ha a külső hőmérséklet változása észrevehető a külső szigetelésen és az épületfalak tömegén keresztül a referenciaszoba mérőérzékelőjén.
A referenciaszoba helyiséghőmérsékletének szabályozását általában hagyományos módon lehet elvégezni digitális vezérlők használatával , amelyeket a melegvíz -kör szabályozott rendszeréhez kell igazítani.
Az iparilag gyártott kazánokat gyakran digitális vezérlőkkel tervezik, fuzzy logikát alkalmazva . A fuzzy vezérlő alapötlete a szakértői tudás nyelvi kifejezésekkel történő integrálásához kapcsolódik, amely révén a fuzzy vezérlőt empirikus módszertan segítségével többé-kevésbé optimálisan modellezik egy nemlineáris folyamathoz, több bemeneti és kimeneti változóval, matematikai a folyamat modellje (Controlled system) jelen van.
Egyszerűen fogalmazva, a homályos logika alkalmazása megfelel az emberi gondolkodásmódnak, felismerve egy ismeretlen rendszer viselkedésének tendenciáit, előre látva azokat és ellensúlyozva a nem kívánt viselkedést. Ezt a cselekvési irányt egy szabályalap úgynevezett „HA-AKT ellenőrzési szabályai” határozzák meg.
Folyamatos és szakaszos szabályozás folyamata:
- A referenciaszoba helyiséghőmérsékletét egy fokozatmentes vezérlővel lehet szabályozni, amely egy folyamatosan működő keverőszelepre ( háromutas keverő ) hat , amely hőigény esetén hozzáfér a kazánhoz. Ezt az irányítási formát gyakran használják a lakóépületekben.
- A referencia szoba szobahőmérsékletét kétpontos vezérlővel lehet szabályozni.
- Ez az alacsony költségű változat különösen alkalmas szakaszos működésre az égő ciklikus be- és kikapcsolására.
Szakadatlan szabályozás
A megszakított kétállású szabályozó hiszterézis nélkül olyan tulajdonságokkal rendelkezik, amelyek nagy hurokerősítésnek felelnek meg. Az, hogy teljes mértékben használható -e, a szabályozott rendszer típusától függ. Ez a vezérlő különösen alkalmas olyan vezérlőrendszerekhez, amelyeket széles határok között kell szabályozni a folyamatos teljesítmény beállításhoz szakaszos üzemben (be- és kikapcsolás).
A maximális és az aktuális hőenergia-szükséglet arányát a be- és kikapcsolási idők aránya adja meg:

A kétállású vezérlő manipulált változója a vezérlési eltéréstől függően meghatározza a bekapcsolási idő és a kikapcsolási idő arányát. A szabályozó hiszterézise és a szabályozott rendszer holtidőbeli viselkedése csökkenti a kapcsolási gyakoriságot. A kétállású vezérlő speciális visszajelzése és a vezérlési eltérés D komponensének aktiválása növeli a kapcsolási gyakoriságot.
A hőenergia áramlásának kiszámítása
A hőenergia-áramlások viselkedését az egyes funkcióblokkokkal ellátott tömbdiagram segítségével lehet kiszámítani, hogy bemutassák a hőenergia-áramlások dinamikus időbeli viselkedését az úgynevezett interfészeken (pl. Égő / kazán, radiátor / levegő vagy belső / külső falak / külső időjárás). A funkcióblokkok megfelelő matematikai modelleknek felelnek meg, mint rendszerleíró funkciók.
A szobahőmérséklet éjszakai és éjszakai csökkentése
Az épület falainak tárolási viselkedése és szigetelése döntő fontosságú az energiatakarékosság szempontjából az úgynevezett nappali-éjszakai szobahőmérséklet-csökkentés segítségével. Az állandóan alacsony külső hőmérséklet és a szobahőmérséklet hosszabb távú csökkentése révén az energiatakarékossági potenciál nagyszerű. Ha a helyiség hőmérséklete rövid időre lecsökken, az épület falait újra fel kell melegíteni anélkül, hogy a falazat határoló felületei és a szigetelés helyhez kötöttek volna, ami lehetővé teszi az energiatakarékosságot.
Külső előremenő hőmérséklet korlátozás
A lakóterek hőigénye a nagyon hideg télen többszörösen magasabb, mint az ősz és tavasz közötti átmeneti időszakban. Ezért a fűtőkör előremenő hőmérsékletét a külső hőmérséklettől függően szabályozón keresztül elővezérléssel korlátozzák, így elkerülhető a szobahőmérséklet nagy túllépése (szabályozott változó), de a hőveszteség is.
A radiátor hőmérsékletét általában nem mérik, azt az előremenő hőmérséklet és a kazán visszatérő hőmérsékletének középértékéből rögzítik . A szigetelt csővezetékek hőveszteségeit figyelmen kívül hagyják.
A fűtési kör előremenő hőmérsékletének a külső hőmérséklet függvényében történő korlátozására szolgáló jellemző görbe a kereskedelmi rendszerekben beállítható, és az éghajlati zónától függ . A korlátozott előremenő hőmérsékletnek valamivel magasabbnak kell lennie, mint a beállított szobahőmérséklet hőigényéhez szükséges érték. Az előremenő hőmérséklet korlátozását a külső hőmérséklet függvényében egyszerű kétpontos szabályozóval lehet elvégezni.
A fűtésvezérlő kör zavaró változói
A szobahőmérséklet szabályozásának zavarváltozói a hőenergia szakaszos működés során történő előállításának változásai. B. a gáznyomás ingadozásainak hatása (gázkazán) vagy a fűtőolaj (olajkazán) fűtőértékének változása elhanyagolható.
A szobahőmérsékletet befolyásoló fő rövid távú zavarok a nyitott ajtók vagy ablakok és a napsugárzás az ablakok területén.
Az épület fűtésének fő zavarváltozója a külső hőmérséklet hatása. A külső hőmérséklet változása, valamint a szél és a csapadék hatása hosszú távú zavar az épület tömegének hőtároló képessége miatt.
A szabályozott rendszerekben a zavarváltozók minden részlegesen vezérelt rendszert megtámadhatnak. A rövid távú zavarváltozók kismértékben befolyásolják a szabályozott változó tényleges értékét, ha a szabályozott rendszer bemenetén jelentkeznek. A zavarváltozók a legnagyobb hatással vannak a szabályozott rendszerekre, amikor a szabályozott rendszer kimeneténél jelentkeznek.
A referenciaváltozó ugrással rendelkező lineáris vezérlőhurok értékelését a referenciaváltozó -átviteli függvény segítségével számítják ki.
A lineáris vezérlőhurok zavartalan viselkedésének értékelését egy lineáris vezérlőrendszeren gyakran a zavarváltozó átviteli funkciójú zavarugrás segítségével számítják ki.
A vezérlőhurokban lévő stacionárius vagy hirtelen vagy impulzusszerű zavarváltozókat pozitívan vagy negatívan lehet figyelembe venni egy grafikus jeláramlási diagramban egy összeadási pont használatával.
A fűtési rendszer vezérlőrendszerében a legmeghatározóbb és legszélesebb körben változó zavarváltozó a hőenergia kiáramlása a szobahőmérsékletről az épület falain keresztül a külső időjárás felé. Míg a zavarváltozó bármely vezérlőáramkörre gyakorolt hatása csak technikai információkat vagy a szabályozott változó megkövetelt specifikus viselkedését mutatja, az épület hőmérsékletszabályozójának a külső időjáráshoz való áramlásának zavarváltozója jelentős mértékű energiaköltségi tényezőt jelent.
A külső időjárásra irányuló energiaáramlás normál üzemi körülmények között történik, azaz H. zárt ablakok és ajtók, a következők függvényében:
- a külső időjárástól, például a külső hőmérséklettől, a naptól, a széltől és az esőtől,
- az épület hőszigetelésének minőségéről .
- Minél jobb a külső szigetelés, annál alacsonyabb lehet a radiátor hőmérséklete egy adott külső hőmérsékletnél.
- a referencia szobahőmérséklet méretétől
- Minden egyes csökkentett Celsius fok egy „jó közérzetű szobahőmérséklet” esetén jelentősen csökkenti a radiátor hőmérsékletét százalékban.
- a radiátorhőmérséklet három matematikai almodelljének uralkodó időállandójának méretétől a szobahőmérsékleten át a külső hőmérsékletig.
- Az állandó kültéri időjárási körülmények és a referencia -helyiséghőmérséklet adott célértéke esetén a létrehozott hőenergia és az épületen átáramló hőenergia között egyensúly alakul ki kellően hosszú idő elteltével.
Fűtésvezérlő kör szimulációja részmodellekkel

Feladat: A radiátor átlaghőmérsékletének és a referencia -nappali szoba hőmérsékletének időbeli viselkedésének kiszámítása a szobahőmérséklet alapjel specifikációjához 5 ° C és 20 ° C között, -10 ° C álló külső hőmérséklet mellett. A szél és a csapadék nem változhat ebben a folyamatban.
A referencia szobafűtés-szabályozás szimulációjának jeláramlási diagramja mutatja az almodellek közötti kapcsolatokat.
A fűtésszabályozó kör adatai A referenciaszoba helyiséghőmérsékletének szabályozási folyamatának durva kiszámításához egyszerűsítéseket és számszerű feltételezéseket kell levonni a tapasztalatokból. A következő adatok vannak megadva:
- maximális előremenő hőmérséklet: 80 ° C
- Előírt szobahőmérséklet: 20 ° C
- álló külső hőmérséklet: -10 ° C
- A hőenergia kiáramlását (° C -ban) empirikusan mérik:
- Ha a radiátor átlagos helyhez kötött hőmérséklete 60 ° C és a helyhez kötött külső hőmérséklet -10 ° C, akkor a szobahőmérséklet 20 ° C -ot kellően hosszú idő elteltével éri el.
- Ezen információk alapján az 1 ° C -os szobahőmérséklet -változás megfelel a radiátor hőmérsékletének és a szobahőmérséklet közötti különbségnek a külső hőmérséklethez viszonyított arányához:
- Faktor = [60 ° C - (-10 ° C)] / [20 ° C - (-10 ° C)] = 2,33 ° C a szobahőmérséklet 1 ° C -os változásakor
- Korlátozott átlagos radiátor hőmérséklet -10 ° C külső hőmérsékleten: 70 ° C
- A szobahőmérséklet álló értékű kezdeti értéke fagyvédelmi módban, alapértékként: 5 ° C
- A radiátor átlagos hőmérsékletének kiszámított álló kezdeti értéke fagyvédelmi módban:
- A szükséges z helyhez kötött referencia szobahőmérséklethez. B. 5 ° C, d. H. A szobahőmérséklet 15 ° C -kal történő csökkentése a szükséges radiátor hőmérsékletet eredményezi:
- A radiátor hőmérséklete = 60 ° C - 2,33 15 ° C = 25 ° C.
A részmodellek meghatározása a becsült adatok alapján
Az alapjel dinamikus folyamatához a radiátor hőmérsékletére, a helyiség hőmérsékletére és a hőenergia kiáramlására vonatkoztatva az egyes rendszerek kezdeti körülményeit kell figyelembe venni.
- 1. részmodell: Hőenergia -termelés az égőtől a radiátor hőmérsékletéig
- Az égőben és a kazánban keletkező hőenergiát az összes csövön és radiátoron keresztül szivattyúzzák előremenő hőmérsékletként a fűtőszivattyúval, és visszatérő hőmérsékletként ismét megjelenik a kazánon. Az előremenő és a visszatérő hőmérséklet átlagértéke a radiátor átlagos hőmérséklete.
- Adat:
- Tt = 4 [perc], T E = 60 [perc] növekedéssel, T E = 100 [perc] a fűtési energia csökkenésével:

- 2. részmodell: a radiátor hőmérséklete szobahőmérsékletre
- A radiátorok által leadott hőenergia felmelegíti a helyiség levegőjét, amely először az ablakokra, majd a mennyezetre emelkedik és lehűl. Ez konvekció és sugárzás révén levegő turbulenciához vezet , amely holt- és ülepedési idő után is eléri a szobahőmérséklet -érzékelőt .
- A mért és szabályozott referencia szobahőmérséklet nem azonos a belső fal hőmérsékletével, a referencia szoba padlójával és mennyezetével, amelyen keresztül a hőenergia eláramlik a külső időjárásra (mint minden helyiség képviselője).
- Adat:
- Tt = 10 [perc], T E = 200 [perc] növekedéssel, T E = 300 [perc] a fűtési energia csökkenésével:

- 3. részmodell: szobahőmérséklet az épület falának belsejétől a külső és a külső időjárás között
- A matematikai modell a hőenergia elvezetésére a helyiség levegőjéből az ablakokon és az épület falain keresztül a külső szigeteléshez és időjárás -viseléshez nagyon bonyolult, ezért egyszerűsített.
- A 3. részmodell egy statikus részből áll, amely egyenes vonalú egyenlet segítségével reprodukálja a radiátor, a helyiség és a külső hőmérséklet közötti kapcsolatot, valamint egy dinamikus részből, amely figyelembe veszi az épület falainak és szigetelésének kapacitását.
- A helyiség falainak jellegétől (hőtároló kapacitás, hővezető képesség, belső hőszigetelés, a belső és külső falak aránya) és a külső szigetelőanyagtól függően ez egy bonyolultabb, magasabb rendű rendszer lehet. nagy uralkodó időállandó. Ennek a 3. almodellnek az egyszerűsítése érdekében egy elsőrendű késleltető elem (PT1 elem) van kiválasztva nagy egyenértékű időállandóval a dinamikus rendszer viselkedéseként.
- Az energiaáramlás szimulációjához statikus kapcsolat van ezzel az információval, amely egyenes egyenlettel határozható meg.
- Az időbeli viselkedés egyszerűsített modellje:

- Ha feltételezzük, hogy lineáris összefüggés van a radiátor hőmérséklete és a kiválasztott helyiséghőmérséklet között állandó külső hőmérsékleten, akkor a radiátor hőmérsékletének értéke kiszámítható a különböző helyiséghőmérséklet -egyenes egyenletekből .
- Általános egyenes egyenlet X bemeneti változóként és Y kimeneti változóként:

- A 3. almodell statikus kapcsolata
- Egy egyenes egyenletet használunk annak meghatározására, hogy mely értéket kell kivonni a szûrt radiátor hõmérsékletébõl (= 2. kimeneti modell) a külsõ hõmérséklet függvényében, hogy a szobahõmérséklet szabályozó változó legyen.
- 20 ° C -os szobahőmérséklet esetén a hozzá tartozó radiátor hőmérséklete 60 ° C. A szobahőmérséklet egy másik értékéhez a hozzá tartozó radiátor hőmérséklet kiszámítható a hőmérsékletkülönbségek –10 ° C arányából:

- A 3. statikus modell esetében a [radiátor hőmérséklete - szobahőmérséklet] különbségre van szükség. Ezt az értéket kivonjuk a 2. modell kimenetéből:
![[\ theta _ {\ text {Radiátor hőmérséklete - szobahőmérséklet}}]] = 13 {,} 33 \ + \ {\ frac {40-13 {,} 33} {20}} \ \ cdot \ [\ theta _ { \ text {Szobahőmérséklet}}]](https://wikimedia.org/api/rest_v1/media/math/render/svg/9b7e1dde8ff3c2acc2ea428c2d0ae5e1a0b2d8f4)
- Ennek eredményeképpen a szobahőmérséklet alapértelmezett ugrásainak statikus értékei, a radiátor hőmérséklete és az összes közbenső érték statikus értékei:
-
- Alapértelmezett szobahőmérséklet 20 ° C:
- [A radiátor hőmérséklete] - [A radiátor hőmérséklete - szobahőmérséklet] = [szobahőmérséklet] = 60–40 = 20 ° C
-
- Alapértelmezett szobahőmérséklet 5 ° C:
- [Radiátor hőmérséklete] - [radiátor hőmérséklete - szobahőmérséklet] = [szobahőmérséklet] = 25–20 = 5 ° C
A fűtésszabályozó hőmérséklet -értékeinek grafikus ábrázolása

Feladat A szabályozott rendszer részmodelljei alapján ki kell számítani és grafikusan megjeleníteni a radiátor hőmérsékletének és a szobahőmérsékletnek a fagyvédelmi módtól az üzemállapotig tartó grafikus lefolyását.
- Kereskedelmi számítógépes programok állnak rendelkezésre az átviteli rendszerek kiszámításához vagy a vezérlőhurkok szimulálásához. A legismertebb programokkal, mint például a MATLAB és a Simulink, kiterjedt utasításkészletek állnak rendelkezésre a dinamikus rendszerek elméleti modellezésére és számos speciális vezérlési parancsra.
- Alternatívaként a lineáris rendszereket számszerűleg is kiszámíthatjuk differenciálegyenletek segítségével. A nemlineáris rendszerek, például a kétállású vezérlő könnyen kiszámíthatók az IF-THEN-ELSE utasítások segítségével. A számítási sorrend sorba kapcsolt rendszerek láncolatára vonatkozik, kezdve a bemeneti jeltől a végéig. Minden k sorozat a k · Δt diszkrét időre vonatkozik.
A jobb megértés érdekében két diagram látható a 3. részmodell statikus és dinamikus viselkedésével.
- A hőmérsékleti értékek időbeli alakulásának grafikus ábrázolása az épület falainak hőtárolása nélkül (3. részmodell, T = 0).
- A hőmérsékleti értékek időbeli viselkedésének grafikus ábrázolása az épület falainak hőtárolásával (3. részmodell T = 500 [perc]).
A szimulációs eredmények kritikus értékelése
- Elvileg a radiátor hőmérséklete és a szobahőmérséklet számított időgörbéje megfelel a reális fűtésszabályozásnak.
- A matematikai modellek megbízhatósága
- A dinamikus folyamat szimulációja olyan jó, mint a szabályozott rendszer matematikai modelljeinek minősége.
- Az 1. modell (hőenergia -termelés a radiátorhoz) nagyrészt megfelelhet a valóságnak.
- A 2. modell (a szobahőmérséklet fűtése) fizikailag az 1. modell után található, de nem garantálja, hogy az 1. modell a nagyobb időállandó miatt interferenciamentes. Többet hat, mint az elsőrendű aluláteresztő szűrő a fűrészfog változásakor a radiátor hőmérsékletében.
- A 3. modell (a hőenergia kifelé történő kiáramlása) kivonja a kifelé áramló hőenergia arányát a 2. modell kimeneti értékéből. Bár a 3. modell elosztott energiatároló rendszer, a könnyebb kiszámíthatóság érdekében koncentrált energiatároló rendszerként kezelik. Ez azt eredményezi, hogy a radiátor hőmérsékletének és a külső hőmérsékletnek a függvényében szabályozhatóan változtatható a helyiséghőmérséklet.
- Az összes almodell időállandóit becsüljük.
A hőmérséklet értékek grafikus ábrázolása

A jobb megértés érdekében a vezérlési folyamatokat 2 diagram mutatja, statikusan a falak tárolt hőenergiája nélkül, és dinamikusan a falak tárolt energiájával. Ez a harmadik részmodell, amelynek időállandóját egyszer T = 0 és T = 500 értékre állítjuk be.
Az alábbiakban az épületfűtés szabályozó hurok modelljének szimulációját mutatjuk be az alapjel ugrásához az 5 ° C -os fagyvédelmi üzemmódból 20 ° C üzemmódba.
Hozzászólás a harmadik részmodell szimulációjának illusztrációjához a helyiség falainak tárolókapacitása nélkül az épület falai.
Az alapjel ugrás 200 perc elteltével történik. Az egyszerűsített statikus 3. részmodell, mint PT1 elem, a T = 0 időállandó viselkedésével a radiátor hőmérsékletének és a szobahőmérsékletnek az egyensúlyi állapotát mutatja, amelyek kellően hosszú idő után jönnek létre. Az alacsonyabb hőmérsékleti értékekről a felső hőmérsékleti értékekre való áttérés nem valós időben, mert az épület falainak tárolt hőjét nem veszik figyelembe a radiátor hőmérsékletének és a helyiség hőmérsékletének minden egyes értékénél.
Hozzászólás a harmadik részmodell szimulációjának illusztrációjához, a szobafalak tárolókapacitásával. A hőenergia áramlásának kiszámítása a kezdeti értékektől a végső értékekig figyelembe veszi az épület tárolt hőenergiáját falak.
Az alapjel ugrás 200 perc elteltével történik. Az egyszerűsített statikus 3. részmodell, mint PT1 elem a helyiség falainak hőtároló képességéhez, T = 500 perc időállandóval mutatja a radiátor hőmérsékletének és a szobahőmérséklet emelkedésének viselkedését. Világossá válik, hogy a helyiség hőmérséklete már elérte a 20 ° C -os célértéket, míg a radiátor hőmérséklete csak 45 ° C -on szükséges a falak tárolt hőenergiája miatt. Csak körülbelül 2000 perc elteltével válik állandóvá a radiátor 60 ° C -os hőmérséklete, állandó időjárási körülményeket feltételezve.
Matematikai módszerek egy vezérlőhurok leírására és kiszámítására
Ez a fejezet a vezérléstechnika és a rendszerelmélet módszereinek alkalmazását mutatja be a dinamikus rendszerek és vezérlőhurkok kiszámításához. A rendszerleírások, az átviteli funkciók, a lineáris és nem lineáris vezérlésű rendszerek, az időinvariáns és az idővariáns rendszerek, a kétpontos vezérlők, a matematikai rendszermodellek és a számítási számítások módszereinek feltételeit érintik, és segítséget nyújtanak a részletes cikkekhez, ill. fejezeteiket.
A dinamikus rendszer egy olyan funkcionális egység, amely meghatározott időreakcióval rendelkezik, és legalább egy jelbemenettel és egy jelkimenettel rendelkezik. Egy valódi dinamikus átviteli rendszer modelljeit ( modellezését ) matematikailag a következők írják le:
- Átviteli funkció és frekvenciaválasz
- Állami űrképviselet
- Differenciaegyenlet (differencia módszer ) , lineáris dinamikus rendszerek numerikus számítása. A nemlineáris rendszereket is érinti (logikai parancsok, táblázatértékek).
Rendes differenciálegyenletek
A differenciálegyenlet (röviden DGL) olyan egyenlet, amely egy vagy több ismeretlen függvény deriváltját tartalmazza. Különböző fizikai problémák formálisan azonos módon jeleníthetők meg a DGL-en segítségével.
Ha a levezetések csak egy változóra vonatkoznak, akkor "rendes differenciálegyenletről" beszélünk, ahol a "közönséges" kifejezés azt jelenti, hogy a vizsgált függvény csak egy változótól függ. A technológia, a természet és a társadalom számos dinamikus rendszere leírható a hagyományos DGL-ekkel.
Egy lineáris ODE csak az első hatványban tartalmazza a keresett függvényt és származékait. Nincsenek termékek a keresett függvényből és származékaiból; Hasonlóképpen, a keresett függvény nem jelenik meg a trigonometrikus függvények argumentumaiban, logaritmusokban stb.
Differenciálegyenlet létrehozása A differenciálegyenlet egy ismeretlen függvény meghatározó egyenlete. A DGL megoldása nem szám, hanem függvény!

Példa elektromos oszcilláló áramkörre: Feszültségmérleg: Kirchhoff 2. tétele szerint a hálóban lévő összes feszültség összege nulla.

Az R ellenállás feszültségcsökkenése az U R = i · R -ből származik. Az indukció törvénye szerint az induktivitás feszültsége U L = L · di / dt. A kondenzátor töltési árama arányos a feszültségváltozással a kondenzátor i (t) = C · dy / dt.
A háló-tétel alkalmazása először egy elsőrendű differenciálegyenlethez vezet:

Ha beírjuk a DGL -t az i (t) számára:

egy, akkor az oszcillációs egyenlet eredménye:

Bevehetők olyan időállandók, mint T 1 = R * C és T 2 ² = L * C. Ha valaki a rendszerleírásban megszokott bemeneti változó és kimeneti változó ábrázolását is lecseréli , akkor a soros rezonancia áramkör jól ismert DGL-je:

Az átviteli funkció alapjai rendszerleírásként

A lineáris időinvariáns rendszerek leggyakrabban bemutatott rendszerleírása a komplex frekvenciájú átviteli függvény . Sikeresen használják a rendszer elemzésére, a rendszer szintézisére, a rendszer stabilitására, és lehetővé teszi az önkényesen kapcsolt, reakciómentes alrendszerek algebrai kezelését.


A átviteli függvény írja le, hogyan függ a kimeneti jel egy lineáris , időinvariáns rendszer ( lží rendszer ) annak bemeneti jel a kép területén (gyakorisága a területen, s-terület). Ez a Laplace transzformált kimeneti változó és az átalakított bemeneti változó hányadosa :



A Laplace transzformáció egy integrált transzformáció, amely felhasználható egy időfüggvény átvitelére képfüggvénybe a komplex frekvenciával . A képfüggvény ismét időfüggvényként ábrázolható különböző matematikai módszerekkel.



A dinamikus időinvariáns rendszereket koncentrált energiaraktárakkal (pl. Rugótömeg-csillapító rendszerek vagy elektromos L, C és R elemek) szokásos differenciálegyenletek írják le állandó együtthatókkal. Amikor a rendszer tétlen állapotban van, az energiatárolók értéke nulla.
A számítás egyszerűsítése és a megértés megkönnyítése érdekében a differenciálegyenletet Laplace -transzformációnak vetik alá . A Laplace -féle differenciálódási tétel szerint a differenciálegyenlet 1. rendű deriváltját komplex frekvenciaként az s Laplace -változó váltja fel. Az n -edik rendű magasabb származékok helyébe a .

Példa egy közönséges differenciálegyenletre állandó együtthatókkal:

A differenciálegyenlet Laplace -transzformációja:

A differenciálegyenlet a és b együtthatói azonosak az átviteli függvényével.
Az eredmény a transzformáció definiált , mint egy átviteli függvény szerint a sorrendben a szempontjából az eredményül kapott polinom, mint az arány a kimeneti változó a bemeneti változó . A G (s) átviteli függvény mindig tört-racionális függvényként írható fel . Mivel az átviteli függvény a bemeneti és kimeneti viselkedés leírására szolgál, az átviteli rendszernek egy adott bemeneti változó adott időpontjában nulla értékű kimeneti változójával kell rendelkeznie .


Az átviteli függvény faktorizálása az s tartományban
A nullák meghatározásával az átviteli függvény polinomjai termékformába hozhatók ( lineáris tényezők ) a számlálóban és a nevezőben. A pólusok (a nevező nullái ) vagy a nullák (a számláló nullái) vagy nulla, valós vagy összetett konjugátum . A termékábrázolás az átviteli függvény számlálójában és nevezőjében matematikailag megegyezik a polinomábrázolással.


Az átviteli függvény pólusai és nullái a rendszer viselkedésének legfontosabb paraméterei.
Példa a polinomábrázolás átviteli függvényére és a pólus-nulla ábrázolásra való bontásra valós lineáris tényezőkkel:

Lineáris tényezők:
- Az elsőrendű lineáris tényezők esetén a nullák vagy pólusok valós számértékek. A stabil rendszerek negatív valós részeket tartalmaznak.
- A másodfokú lineáris tényezőket összetett konjugált nullákkal vagy pólusokkal másodfokú kifejezésekbe egyesítik a könnyebb kiszámítás érdekében, amelyben csak valós együtthatók fordulnak elő.
- A lineáris tényezőket többnyire a nullák és pólusok kölcsönös képződése alakítja át az időállandó reprezentációvá.
- Termékkifejezés az időállandó ábrázolásában, negatív nulla értékkel :

A lineáris vezérléstechnikában üdvözlendő tény, hogy a vezérlőhurok- elemek gyakorlatilag minden rendszeres (fázisminimális) átviteli funkciója vagy frekvenciaválasza írható vagy visszavezethető a következő három alapvető formára ( lineáris faktor ). Teljesen más jelentéssel bírnak, attól függően, hogy egy átviteli függvény számlálójában (differenciáló viselkedés) vagy nevezőjében (késleltető, integráló) vannak.
Az együtthatók számértékeitől és a polinomiális ábrázolástól függően a termékek a következő három formát ölthetik az időállandó ábrázolásban:


Lineáris tényező típusa Jelentés a pultban Jelentése a nevezőben
(Nulla pozíció = 0)Differenciátor, D-tag Integrátor, I-link
(Valódi nulla)PD link Késleltetés, PT1 elem
(Nulla konjugált komplex)PD2 elem: 0 < D <1 esetén Rezgési kapcsolat PT2 kapcsolat : 0 < D <1 esetén



- Itt T az időállandó, s a komplex frekvencia, a csillapítás D foka.
A dinamikus átviteli rendszer átviteli függvénye egyetlen és több lineáris tényezőt is tartalmazhat a számlálóban és a nevezőben.

A változók meghatározása s
- a független változó a komplex frekvenciatartományban (képterület, s-terület) valós részként és képzelt részként. Bármilyen algebrai műveletet engedélyez az s-tartományban, de csak a befejezett Laplace-transzformáció szimbóluma, és nem tartalmaz számértéket. Az exponensek megfelelnek a differenciák deriváltjának mértékének .
- A számértékek az együtthatókból és a polinomiális ábrázolásból jönnek létre , mivel az átviteli függvény polinomjait nullák bontásával lineáris tényezőkre (termékekre) bontják. Ezek a nullák vagy pólusok lehetnek nulla, valós vagy összetett konjugátumok.
- A nullák vagy pólusok valós részei és képzeletbeli részei az együtthatók számértékeitől függően lehetnek, és számértékük is nulla. Ez létrehozza a z lineáris tényezők három formáját. B. az átviteli függvény nevezőjében a viselkedésintegráció, késleltetés, késleltetés 2. rendű konjugált komplex.



A rendszeres átviteli függvények összes előforduló típusának táblázata időállandó ábrázolásban:
Megnevezés → P elem I-link D link PD 1 link PT 1 link PT 2 kapcsolat (vibrációs kapcsolat ) PD 2 link Holtidő elem G (s) átviteli funkció Pólusok és nullák nem nem Átmeneti funkció
(lépésválasz)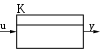





grafikusan nem ábrázolható 





















Megjegyzések az átviteli funkcióhoz
- A lineáris dinamikus rendszerek átviteli függvényként való leírásának nagy előnye a lineáris tényezőkkel az, hogy csak hat könnyen megjegyezhető alapvető rendszer-viselkedési forma létezik, amelyek kombinálhatók nagyobb rendszerformák kialakítására. A nemlineáris holtidő elem transzcendens formája nem tartozik ide, kivéve, ha töredék racionális függvényként közelítjük a holtidő elem viselkedéséhez.
- Más rendszerleírásokkal, például a differenciálegyenlettel, a differenciálegyenlettel, az állapottér -ábrázolással és a vegyes lineáris és nemlineáris modellekkel kapcsolatban előnyös az átviteli rendszerek megnevezése átviteli függvényekként, mivel a rendszerfunkció annyira ismert.
- Az átviteli funkciók egyes átviteli rendszerekként kombinálhatók a tömbvázlat soros és párhuzamos csatlakoztatásában, és algebrai módon kezelhetők.
- A -Gliedes és a -Gliedes nyeresége időállandóként is felírható .
- A -komponensekkel bemutatott átviteli funkciókat "ideálisnak" nevezzük. Ezeket a rendszereket nem lehet "valódi" létrehozni késleltető elemmel ( elemmel) való kombináció nélkül . A késleltető elem időállandójának lényegesen kisebbnek kell lennie, mint a D komponensnek.





- Példa valódi linkre T V ≫ T:
- Az ideális komponensek számszerű számítása a differenciálegyenletek segítségével gond nélkül működik. A differenciálás során nem keletkezhetnek végtelenül nagy élek, mert a számítások idővel történnek.
- Következtetés: A numerikus számításban egy ideális -link teljesen kompenzálja a -linket a tényező azonos időállandóival .




- A 2. rendű átviteli függvény ( -tag) differenciáló formája konjugált komplex nullákkal lehetővé teszi a 2. rendű késleltető elem kompenzálását konjugált komplex pólusokkal azonos időállandókkal és azonos mértékű csillapítással.

- Alkalmazás: A vezérlőhurok bemenetében lévő előszűrő csökkenti a szabályozott változó csillapított rezgéseit, és így nagyobb hurokerősítést tesz lehetővé.
- Az átviteli függvényeket mindig tört-racionális függvényekként írjuk fel.
- A holtidő elem transzcendens függvénye többszörösen köthető egy rendszer átviteli függvényéhez . Az átviteli funkciónak ez a formája, mint komplett rendszer, csak frekvenciaválasz -elemzésekhez alkalmas. A holtidő elemet tartalmazó algebrai műveletek nem megengedettek.
- A nem rendszeres átviteli függvények mínuszjelet tartalmaznak az egyenletben (= pozitív nulla). Ezek pozitív visszacsatolásból (= pozitív visszacsatolásból) származhatnak, és monoton instabil módon viselkedhetnek. Bármilyen bemeneti gerjesztés esetén az instabil elem kimeneti változója végtelenül nagy értékre törekszik a természetes határáig, az időállandó függvényében .


Példa egy elsőrendű késleltető elem jelölésére az erősítési tényezővel :

Az átviteli függvények ilyen típusú egyenletei algebrai módon kezelhetők, lineáris rendszerekre vonatkoznak, és időinvariáns viselkedésre vonatkoznak. Az átviteli funkciók algebrai módon bármilyen lineáris tényezővel kombinálhatók, hogy szabályozott rendszereket és vezérlőköröket alkossanak, amennyiben nincs benne holtidő rendszer. Ha egy bemeneti jelet kap , mint egy teszt jel , az idő viselkedését a kimeneti jel lehet kiszámítani Laplace transzformáció táblázatokat .
Az átvitel blokkszerkezetként működik a jeláramlási diagramban
Az átviteli rendszerek blokkokként kombinálhatók az alrendszerekből. A szuperpozíció elve érvényes . A termékkijelző rendszerei tetszőleges sorrendben mozgathatók. A rendszer kimeneteit nem szabad terhelni a későbbi rendszerbemenetekkel (mentes a visszacsatolástól).
- Párhuzamos csatlakozás:

- A párhuzamos kapcsolat átviteli függvényének egyenlete:

- Soros csatlakozás:

- A soros kapcsolat átviteli függvényének egyenlete:

- Negatív csatolás vagy visszajelzés:

- A negatív visszacsatolás átviteli függvényének egyenlete:

- Olyan vezérlőhurok esetén, amely nem tartalmaz statikus vagy dinamikus alrendszert a negatív visszacsatolási ágban, a G 2 (s) = 1 rendszer.
-

- A zárt vezérlőhurok átviteli funkciója tehát:


- A pozitív visszacsatolás a jelkimenet pozitív additív hatású visszatérése a rendszerbemenethez. A G 1 (s) nyereségének nagyságától függően monoton instabilitáshoz vagy hiszterézis hatáshoz vezet.
- A pozitív visszacsatolás átviteli függvényének egyenlete:

- A G 1 (ek) mint nyitott vezérlőhurok esetén a vezérlő és a szabályozott rendszer alrendszereinek bármely algebrai kombinációja érthető.
Lineárisan vezérelt rendszerek
A lineáris rendszereket az jellemzi, hogy az úgynevezett szuperpozíciós törvény és a megerősítési törvény érvényes. A szuperpozíció -tétel kimondja, hogy ha a rendszert egyidejűleg gerjesztjük az f1 (t) és f2 (t) időfüggvényekkel, akkor a rendszer válasza is az f1 (t) rendszerválaszának és a rendszer válaszának szuperpozíciójából alakul ki f2 (t).
Az erősítési elv azt jelenti, hogy amikor a bemeneti funkció amplitúdója megduplázódik, a rendszer válasza is kétszer akkora.
A természetes lineárisan vezérelt rendszerek gyakran késleltető, integráló és holtidő alrendszereket tartalmaznak.
Az 1. rendű elektromos ellenállású kondenzátor aluláteresztő szűrőt reakciómentes állapotban, T = R C időállandóval a következő átviteli függvény írja le:
Elsőrendű késleltető elem (PT1 elem):

Az átviteli funkcióval rendelkező G (s) átviteli rendszerek időbeli viselkedésének kiszámításához a bemeneti jeleket (tesztjelek) az s tartományban kell meghatározni.
Az időtartományban lévő rendszer lépésválaszának kiszámításához a standardizált 1. lépés (t) Laplace-transzformált teszt bemeneti jelként U (s) = 1 / s.
A PT1 elem időbeli viselkedésének kiszámítására szolgáló egyenlet közvetlenül a Laplace transzformációs táblázatokból olvasható ki:
Keresett funkció az s-területen:

Kapcsolódó funkció az időtartományban:

A K tényező nem vonatkozik az átalakításra, ezért érvényes az s tartományban és az időtartományban is.
Ha az átviteli függvény megfelelő időfüggvényét a Laplace-transzformált bemeneti jel nélkül keresik időállandóban vagy nullában az átalakítási táblázatokban, az eredmény mindig a rendszer impulzusválasza.
A szabályozott rendszerek lineáris típusai
Az elsőrendű késleltető elem esetében a T időállandó azt jelenti, hogy a kimeneti jel a bemeneti jel értékének körülbelül 63% -át érte el a bemeneti jel ugrása után, és a jelgörbe aszimptotikusan megközelíti - kb. 5 időállandó után - a bemeneti jel maximális értéke.
- Az elsőrendű késleltető elem ( PT1 elem ) változatlanul viselkedik, ha az időbeli viselkedés ( időállandó ) nem változik u (t) emelkedő (ugrás) vagy csökkenő (visszatérő) bemeneti jel esetén . Ezt a hozzá tartozó rendes differenciálegyenlet magyarázza, állandó együtthatókkal.
- Másodrendű késleltető elem komplex konjugált pólusokkal, pl. B. egy csillapított rugós tömegű rendszert rezgő elemnek neveznek. A D csillapítás mértékétől függően a lépésválasz az oszcilláció elhalkulásával megközelíti a bemeneti változó maximális értékét.
- A több PT1 elemet tartalmazó szabályozott rendszert kompenzációval vezérelt rendszernek nevezzük, más néven globális ( arányos ) P viselkedés.
- A több PT1 elemet és egy I elemet tartalmazó szabályozott rendszert globális I viselkedésű szabályozott rendszernek nevezzük.
- A késleltető elemekkel ellátott holtidővel ellátott szabályozott rendszer nem számítható fel önkényesen algebrai módon. Kivéve, ha a holtidőt nagyjából töredék-racionális függvényként határozzák meg késleltető elemekkel.
A rendszerleírás előnye az átviteli funkciókkal (holtidő nélküli viselkedés nélkül)
- Az egyes rendszerek bármely rendszerkapcsolatának egyszerű algebrai kiszámítása lehetséges
- A szabályozó vezérlőhurok elemei és a nyitott hurok vezérelt rendszere bezárhatók, hogy szabályozó hurkot képezzenek. A kapott polinomokat pólusokra és nullákra lehet bontani, és ismét faktoriális alapelemként (lineáris tényezőkként) írhatjuk, többnyire időállandó ábrázolásban.
- A pólus nulla ábrázolásából minden rendszertulajdonság leolvasható.
- A grafikus módszerekkel, a „frekvenciaválasz lokuszával” és a „Nyquist stabilitási kritériumával” a zárt vezérlőhurok stabilitása a nyitott (vágott) vezérlőhurok egyes G (s) rendszerei alapján határozható meg.
- Egy ismert Laplace-transzformált tesztbemeneti jel, például a lépés- vagy sokkfunkció esetén az egyes rendszerek vagy vezérlőhurkok időbeli viselkedése kiszámítható és grafikusan megjeleníthető a Laplace-transzformációs táblázatok segítségével.
- A szabályozó kialakítása
- A szabályozott rendszerek egyszerűsíthetők, ha a késleltető elemeket (PT1 elemeket) a vezérlő PD1 elemei kompenzálják.
Átviteli funkció és frekvenciaválasz
Az átviteli függvény a Laplace-transzformált kimeneti változó és a bemeneti változó arányának nem mérhető függvénye. Bármikor azonos együtthatókkal (időállandókkal) alakítható át frekvenciaváltóvá .
A frekvenciaválasz az átviteli funkció speciális esete.

Az átviteli funkcióval ellentétben a lineáris átviteli rendszer frekvenciaválaszát úgy lehet mérni, hogy az ismeretlen rendszert állandó amplitúdójú, változó frekvenciájú szinuszos bemeneti jellel gerjesztjük, és rögzítjük a kimeneti változót. A frekvenciaválasz és az átviteli függvény keletkezése eltérő, a helyesírások azonosak maradhatnak.
A "frekvenciaválasz lokusza" és a "Nyquist stabilitási kritériuma" grafikus módszerekkel egy alrendszer holtidejű viselkedése is kezelhető, mivel ezek a módszerek a nyílt vezérlőhurokra vonatkoznak.


Idővariáns és időváltozatos vezérlésű rendszerkomponensek
Példa épületfűtésre: Fűtött épületben a keletkező hő a radiátorból a szobalevegőn keresztül az épület falaira áramlik a szigetelésen keresztül a külső időjárás felé. A tömegek és a hozzájuk tartozó szigetelés közötti különböző hőáramok mindegyike meghatározott időbeli viselkedést mutat, amelyet meg kell határozni a teljes szabályozott rendszer elemzéséhez.
Idővariáns
Az eddig bemutatott dinamikus rendszerek időinvariáns rendszerek koncentrált energiaraktárakkal.
A dinamikus átviteli rendszer időinvariáns, ha nem változik az idő múlásával, azaz azaz, a rendszer választ , hogy egy azonos bemeneti jel van független. A matematikai rendszerleírás együtthatói állandóak (idővel nem változtathatók, változatlanok).



Egy időinvariáns késleltető elem (PT1 elem) azonos módon viselkedik a jelbemenet ugrásnál, valamint a jel visszatérő ugrásnál, azaz Más szóval, mindig aszimptotikusan törekszik a maximális értékre ugráskor vagy a kiindulási értékre ugyanazzal az időállandóval, amikor visszaugrik.
Idő szórás
Egy dinamikus rendszer leírásához pl. B. a hőáramlás homogén anyagban (víz, levegő, kő) térben elosztott energiatároló rendszer.
Az időváltozatos rendszer különböző módon viselkedik a különböző időpontokban. A műszaki rendszerekben ennek oka leginkább az időfüggő paraméterértékekben rejlik, például az energiatároló együtthatóinak [a származékok időfüggő együtthatói ] megváltoztatásával.
Sok folyamatban az idővariancia hatása olyan kicsi vagy lassú, hogy ezeket a rendszereket megközelítőleg időinvariánsként lehet kezelni.
Az átviteli függvényekhez tartozó közönséges differenciálegyenletek állandó együtthatókkal rendelkeznek. Az állandó együtthatók azt jelentik, hogy a rendszer időbeli viselkedése nem változik. Vajon z. Ha például egy gyorsított tömeg időbeli viselkedését írják le, és ez egy gyorsított rakéta, amely megváltoztatja a tömegét, akkor ez egy időváltozatos folyamat.

A hőáramlás matematikai idővariáns modellje homogén közegben pl. B. Levegő
A térben homogén közegben (anyagban) lévő jelugrás átviteli viselkedését az időbeli viselkedése mutatja két mérési pont között, megközelítőleg elsőrendű késleltető elemként, holtidővel és különböző időállandókkal.
A lépésválasz rögzítése után a homogén közegben történő hőáramlás matematikai modelljét közelíteni lehet egy egyszerű modellel, PT1 elemmel és holtidő elemmel. Az egyenértékű holtidő és az ekvivalens időállandó paraméterei kísérletileg meghatározhatók a rögzítendő mérési protokoll alapján.



Az épületfűtésnél figyelembe kell venni, hogy a kazán gyorsan felmelegszik és a hőszigetelés miatt lassan lehűl. Ugyanez vonatkozik az energia áramlására a radiátorból a helyiség levegőjébe és a falakon keresztül a külső időjárásba. Az ilyen rendszerek viselkednek egy időben változó módon , i. Más szóval, a rendszernek más az időállandója a jelugráshoz, mint a jel ugráshoz. Minél jobb a fűtött közeg szigetelése, annál különböznek a fűtési időállandók (kicsi) és a hőelvezetés (nagy).
Ha a holtidő ábrázolása a számítógépes programmal problémákat okoz, akkor a bemutatott modellegyenlet gyakorlatilag megegyezhet egy nagyon jó közelítéssel, és egyenértékű holtidővel z -vel. B. n = 3 PT1 elem a következőképpen ábrázolható:

Nemlineáris átviteli rendszer
A lineáris rendszer tulajdonsága gyakran nincs megadva, mivel sok kölcsönhatásba lépő rendszer z. B. a szelepjellemzőkkel rendelkező vezérléstechnikában, a módosított határértékekben vagy a kapcsolási folyamatokban nincs linearitás.

A nemlineáris rendszer megjelenhet akár nemlineáris statikus jellemzők, akár nemlineáris műveletek formájában, mint például a változók szorzása vagy osztása algebrai és differenciálegyenletekben.
A második rendű nemlineáris dinamikus rendszer például rugótömeg-csillapító rendszerből származik, ha a rugórendszer vagy a csappantyú nemlineáris. Tekintettel a nemlineáris rendszerek sokféle formájára, nehéz őket meghatározott osztályokba sorolni. A nemlineáris rendszerek egyedinek minősíthetők.
Abban az esetben, a nem-lineáris átviteli rendszerek, legalább egy nem-lineáris függvény jár együtt lineáris rendszerek. Ezeket a nemlineáris függvényeket a folyamatos és a nem folytonos nemlinearitások szerint különböztetjük meg. A folyamatos nemlinearitás nem mutat ugrásokat az átviteli jellemzőben, mint pl B. másodfokú viselkedéssel. Az olyan megszakítás nélküli átviteli jellemzők, mint a korlátozások, hiszterézis, válaszérzékenység, kétpontos és többpontos karakter nem rendelkeznek folyamatos lefolyással.
A szuperpozíció elve nem vonatkozik a nemlineáris átviteli rendszerekre.
A nemlineáris rendszereknél a következő összefüggések merülnek fel:
- Ha nemlineáris átviteli rendszert rögzített működési ponton üzemeltetnek, akkor a rendszer nemlineáris viselkedése helyettesíthető egy lineáris modellel a működési pont közvetlen közelében.
- Minden nemlineáris kapcsolat megközelítőleg lineárisan írható le a kis jelű viselkedésben. A közelítés lesz jobb, minél kisebb a különbség hányados meg a munkapontot.
- Ha egy nemlineáris függvényt grafikus jelleggörbeként adunk meg, akkor a linearizált kapcsolat érintőjének gradiense meghatározható egy érintő létrehozásával a kívánt működési ponton
- A folyamatosan csökkenő vagy emelkedő karakterisztikájú nemlineáris dinamikus rendszer linearizálható azáltal is, hogy beépíti azt saját vezérlőkörébe, és ezáltal dinamikus viselkedése is javítható.
- A nemlineáris differenciálegyenleteket általában csak numerikusan lehet megoldani. Ha egy átviteli rendszert fel lehet bontani alrendszerekre, és az egyes rendszerek nemlineáris viselkedése rendelkezésre áll analitikai egyenletként vagy értéktáblázatként, akkor egy nemlineáris dinamikus rendszer viselkedése viszonylag könnyen kiszámítható.
- A megszakított, nemlineáris, statikus rendszerek és a lineáris rendszerek kölcsönhatása a vezérlőhurkok kialakításához optimalizálható a harmonikus egyensúly grafikus módszerével . A felharmonikus mérleg alkalmazása a nem lineáris vezérlőhurkok elemzésére a tiszta kétlókuszos módszerrel megmutatja, hogy mikor következnek be állandó rezgések, és hogyan lehet elkerülni az állandó rezgéseket.
- Lapos alapú rendszerek
- Egyenletesség rendszerek elmélete egy rendszer tulajdonság , amely kiterjeszti a fogalom ellenőrizhetőségének lineáris rendszerek a nemlineáris rendszerek . Azokat a rendszereket, amelyek rendelkeznek lapos tulajdonsággal, lapos rendszernek nevezzük.
- A lapos tulajdonság a nemlineáris dinamikus rendszerek elemzéséhez és szintéziséhez hasznos. Különösen előnyös a pálya tervezéséhez és a nemlineáris rendszerek aszimptotikus nyomon követéséhez.
A dinamikus átviteli rendszerek numerikus számításának alapjai
A viszonylag egyszerű nemlineáris elemeket tartalmazó átviteli rendszerstruktúrák már nem oldhatók meg zárt módon hagyományos számítási módszerek alkalmazásával a folyamatos időtartományban. A kereskedelemben kapható személyi számítógépeknél bármely hálózott rendszerstruktúra viselkedése viszonylag könnyen meghatározható numerikus számítással.
Kereskedelmi számítógépes programok állnak rendelkezésre az átviteli rendszerek kiszámításához vagy a vezérlőhurkok szimulálásához. Az olyan jól ismert programokkal, mint a MATLAB és a Simulink , kiterjedt utasításkészletek állnak rendelkezésre a dinamikus rendszerek elméleti modellezésére és számos speciális vezérlési parancsra.
Alternatív megoldásként saját számítógépes programjaival nagyon hatékony vezérlőhurok -szimulációkat végezhet differenciálegyenletek segítségével logikai operátorokkal együtt. Viszonylag kevés matematikai ismeretre van szükség.
Ha korlátozó hatások lépnek fel a vezérlőben vagy a szabályozott rendszer holtidő-rendszereiben, vagy ha a vezérlő nemlineáris tulajdonságokkal rendelkezik, mint a kétpontos vezérlő, akkor a vezérlőhurok időbeli viselkedése csak számszerűen számítható a diszkrét idővel . A dinamikus rendszerek számítása az állapottér -ábrázolás módszerével szintén nem lehetséges holtidő -rendszerrel numerikus számítás nélkül.
A numerikus számítás lehetővé teszi a dinamikus átviteli rendszerek belső mozgásának teljes áttekintését táblázatos és grafikus formában. A logikai programparancsokkal és értéktáblákkal kapcsolatban nemlineáris, korlátozó és holtidő rendszerek szimulálhatók.
A numerikus számítás módja

Ha a differenciálegyenlet y (t) kimeneti változójának differenciáljait kicseréljük diszkretizált idővel rendelkező kis különbséghányadosokkal , akkor létrejön egy számszerűen megoldható differenciálegyenlet, amely közelíti a differenciálegyenletet. Hasznos a lineáris elemi rendszereket (átviteli függvények, például I, PT1, D, PD1 elemek) differenciálegyenletekké alakítani. Attól függően, hogy a funkcióblokkok milyen helyzetben vannak a jeláramlási diagramban, ezeket rekurzívan lehet kezelni nemlineáris rendszerekkel vagy holtidővel rendelkező rendszerekkel és számszerű számítási módszereikkel.

A differenciálegyenletek vagy a differenciálegyenletek láncolata, amelyek több sorba kapcsolt elemi rendszert írnak le, lehetővé teszik a kimeneti változó algebrai kiszámítását a bemeneti jeltől függően kis ideig . A rendszer számszerű átfogó megoldása - egyszerű differenciálegyenletekkel - rekurzívan történik számos számítási szekvencia minden kis állandó időintervallumában. A teljes megoldás formája tehát táblázatos. Minden sor ugyanazokat a különbségi egyenleteket tartalmazza a számítási sorrendben, minden oszlop kiszámítja a sorozatot .




A differenciálegyenletek bármely programozási nyelvhez használhatók. A táblázat használata ajánlott, mert könnyen használható, és nincsenek programhibák.
Tekintse meg a részleteket a differenciálegyenlet alkalmazásával (különbség módszer)

Vezérlő hurok kialakítása
Egy vezérlőrendszer kialakítása - egy megfelelő vezérlő összekapcsolása a szabályozott rendszerrel zárt kör kialakítása érdekében - a vezérléstechnika tényleges feladata.
Gyakori alkalmazások fizikai mennyiségek ellenőrzésére
A következő lista néhány fizikai vagy kémiai változót nevez meg, amelyek jellemzően szabályozott változóként fordulnak elő, függetlenül az adott alkalmazástól.
- Hőmérséklet szabályozás
- Nyomás- és erőszabályozás
- Áramlás és hangerő szabályozás
- Szintvezérlés
- Pozíció, pozíció és távolságszabályozás
- Sebesség- és gyorsulásszabályozás
- Fordulatszám és nyomaték szabályozás
- A kémiai paraméterek, például a koncentrációk szabályozása a folyamattechnikában
A vezérlőhurok alapjai
Egy egyszerű vezérlőkörben bármilyen fizikai változó szabályozására az alapjel mérete és a vezérelt rendszer időbeli viselkedése együtt az adaptált vezérlő időbeli viselkedésével határozza meg a szabályozott változó időbeli lefolyását.
A szabályozó feladata általában az, hogy a szabályozott változót a lehető legközelebb közelítse a referenciaváltozóhoz, és minimalizálja a zavaró változók hatását .
A stabil vezérlőhurok instabillá válhat, ha a vezérlő vagy a szabályozott rendszer paraméterei megváltoznak, még akkor is, ha a vezérlőhurok egyes összetevői egyenként stabilak. Másrészt a megfelelő vezérlővel ellátott vezérlőhurok is stabil módon viselkedhet, ha a rendszer egyes összetevői instabilak. A vezérlőhurok pozitív visszacsatolása mindig monoton instabilitáshoz vezet.
A vezérlő P erősítése nem választható tetszőlegesen magasra egy vezérlőhurokban, különben oszcillációs instabilitáshoz vezet a vezérlőhurok minden időfüggő összetevőjének fáziseltolási tulajdonsága miatt-a negatív visszacsatolás miatt. Vajon z. B. egy állandó amplitúdójú, változó frekvenciájú jelet vezetnek be egy legalább három PT1 késleltető elemmel rendelkező szabályozott rendszer bemenetére, majd a kimenő jel amplitúdója a frekvencia növekedésével csökken, és a kimenő jel elmarad a bemeneti jel mögött . Ha egy ilyen szabályozott rendszer egy vezérlővel együtt egy vezérlőhurokhoz van csatlakoztatva, akkor egy pozitív visszacsatolás történik a negatív visszacsatolás helyett az alapjel / tényleges érték összehasonlításakor a kritikus hurok erősítéshez, és a vezérlőhurok instabillá válik az oszcillációk tekintetében.

Egy vezérlőhurok stabilitása az egyszerűsített Nyquist -kritérium szerint becsülhető meg az amplitúdóválasz és a fázisválasz Bode -diagramon történő bemutatásával :
- A zárt vezérlőhurok akkor stabil, ha a vágásvezérlő hurok a fázisválasz fázisforgásának keresztezési frekvenciáján van . Ez az összefüggés a stabil késleltetési elemekre (a pólusok negatív valós részeire) vonatkozik, egészen a kettős pólusig az eredetben és a szabályozott rendszer holtidejű eleméig.





Ha egy statikus vagy illékony zavarváltozót megtámadnak, akkor a szabályozott változó ideiglenes változást mutat a szabályozott változóban ebben az időpontban. A statikus zavarváltozó állandó rendellenességet okozhat, ha z hurokerősítés. B. folyamatos arányos szabályozó (P vezérlő) használatakor nem elég magas. Ha a szabályozó rendelkezik egy időintegrál komponenssel (I elem), akkor a statikus vezérlés eltérései eltűnnek, de a vezérlési folyamat lassabbá válik a hurokerősítés szükséges csökkentése miatt.
A szabályozó feladata a meghatározott követelményeknek megfelelően meghatározni a szabályozott változó időbeli viselkedését a statikus és dinamikus viselkedés tekintetében. Bonyolultabb vezérlőhurok -struktúrákra lehet szükség ahhoz, hogy megfeleljenek az ellentmondó követelményeknek, például a jó vezérlésnek és a zavaró viselkedésnek.
Az átmeneti függvény (a szabályozott változó lépésreakciója) a vezérlő hurokból a másodfokú szabályozott rendszerrel (pólus-nulla kompenzáció nélkül) a hurok erősítésének szintjétől függően elkerülhetetlen, időszakosan csillapított átmeneti választ okoz.
A vezérlőhurok referenciaváltozója rögzített alapértékként, programvezérelt alapjel specifikációként vagy folyamatos, időfüggő bemeneti jelként, a szabályozott változó speciális követési tulajdonságaival tervezhető.
A vezérlőhurok átmeneti függvényének paraméterei
A vezérlőhurok a magasabb rendű szabályozott rendszer lineáris összetevőivel, esetleg rövid holtidővel és a vezérlő manipulált változójának korlátozott korlátozásával rendelkezik, a grafikus ábrán látható tipikus átmeneti funkcióval (lépésválasz). A következő táblázaton alapuló paraméterek, amelyek a referenciaváltozó vagy a zavarváltozó ugrásaiból erednek, a vezérlési és rendszerparaméterektől függenek. A vezérlési paraméterek szisztematikus módosításával a paraméterek kívánt tulajdonságai (beleértve a minőségi követelményeket, a dinamikus követelményeket) elérhetők.
Az átmeneti függvény paramétereinek alábbi feltételei többnyire szabványosak a szakirodalomban. A kapcsolódó rövidítések nem.
A vezérlőhurok átmeneti függvényének paramétereinek táblázatos listája:

| leírás | DIN IEC 60050 | DIN 19226 | A kifejezések meghatározása |
|---|---|---|---|
| Késési idő | T e | T u | A belépési ugrástól az abszcissza fordulási érintőjének szakaszáig eltelt idő |
| Emelkedési idő (kiegyenlítési idő) |
T b | T g | Érintőszakasz abszcissza a szakasz célértéke után |
| Emelkedési idő (rendezési idő) |
T kr | Az idő a bemeneti ugrástól, amíg y (t) átlépi a tűrési sávot. Egy kontroll reakciósebességének paramétere. |
|
| Leülepedési idő (bomlási idő) |
T cs | A bemeneti ugrástól az y (t) oszcillációs amplitúdóig eltelt idő a tűréshatáron belül van. A rezgési amplitúdók csökkenésének paramétere. |
|
| Túllépés | x m | A legnagyobb amplitúdó a szabályozott változó egyensúlyi értéke felett. Állandó érték = t → ∞ tényleges értéke. (Referencia változó ugrás = 1). |
|
| A szabályozott változó maximális értéke |
Túllépés + egyensúlyi érték |
Ha az emelkedési idő, az ülepedési idő és a túllépési amplitúdó ezen paramétereit együtt minimalizálni lehetne, akkor a vezérlőhurok optimálisan méretezhető lenne. Sajnos a vezérlő paramétereinek megváltoztatásakor az említett értékek részben az ellenkező viselkedést mutatják. Ha például a hurokerősítést növelik, akkor az emelkedési idő lerövidül, az ülepedési idő és a túllépési tartomány nő.
A vezérlőhurok a parancs, a zavar és a robusztussági viselkedés szempontjából van optimalizálva. A fent említett minőségi kritériumok típusát meg kell adni a projektleírásban.
Minőségi kritériumok ( ellenőrzési minőség , integrált kritériumok , az ellenőrzési magatartás minősége)
Ez az y ( t ) vezérlési eltérés és a w ( t ) referenciaváltozó lépési függvényének lépésbeli válaszának időbeli eltérésének mértékét jelenti a teljes átmeneti folyamat során az integráció során.
Ezekkel az integrált kritériumokkal a w ( t ) - y ( t ) vezérlési eltérést különböző módon integrálják az átmeneti folyamat időtartamára. Különbséget tesznek a következők között:
- lineárisan uralkodó felület
- négyzet alakú uralkodó felület
- Mennyiség szabályozási terület: (a szabályozási eltérés összegének integrálása)
- ITAE kritérium : Idővel megszorozva a kis rezgési amplitúdókat jobban figyelembe vesszük.
A vezérlőhurok összetevői

A vezérlés minőségétől, a vezérlők számától, a vonalon meglévő jelek típusától, a kiegészítő tápegység típusától és a biztonsági előírások figyelembevételétől függően eldönthető, hogy a megszakított vezérlő, analóg vezérlő, digitális vezérlő és esetleg redundáns berendezések használhatók.
Folyamatos vezérlők viselkedése:
- A P vagy PD viselkedésű vezérlők lehetővé teszik a vezérlőhurok gyors reagálását.

- (Lásd a manipulált változók korlátozásának hatását a következő egy rész kivételével).
- Az (elméletileg) végtelen erősítés miatt az I komponensű vezérlők statikusan pontosak, de lassúak. Az I komponensnél egy további pólust helyeznek a nyitott vezérlőhurok átviteli funkciójába.
- A PI viselkedésű vezérlők alkalmasak a holtidővel rendelkező szabályozott rendszerekhez is.
- A klasszikus formában a PID szabályozókat az egyes komponensek párhuzamos csatlakoztatásával hozták létre. A társított G (s) átviteli függvény algebrai átalakításával az ideális PID szabályozó két PD elemből és egy I elemből áll. Ily módon a vezérlő paraméterezése egy adott magasabb rendű szabályozott rendszer esetében közvetlenül meghatározható két domináns időállandó esetén. A nyitott vezérlőhurok esetében a szabályozott rendszer két késleltető eleme teljesen kompenzált. Ugyanakkor egy PI elem is beillesztésre kerül. Az optimális erősítési tényező nagysága empirikusan vagy numerikus szimulációval határozható meg a zárt vezérlőhurok kívánt lépésválaszán keresztül.

- Ideális PID szabályozó párhuzamos szerkezete: .
- Ideális PID szabályozó soros felépítésben .
- Conversion PID-szabályozó a sorozat szerkezet párhuzamos szerkezete: .
- A párhuzamos szerkezet konverziós PID -szabályozója vonalszerkezetben .
- Megjegyzés: Ha a négyzetgyök előjele negatív lesz, konjugált komplex nullák jönnek létre, és így létrejön a 2. rendű, rezonanciaponttal rendelkező PID -szabályozó. Ez a vezérlő teljes mértékben képes kompenzálni a 2. rendű szabályozott rendszert, komplex konjugált pólusokkal. Ugyanazokat az időállandókat feltételezve.




- Az ideális vezérlők nem tekinthetők műszakilag megvalósíthatónak, ha a számlálóban az átviteli függvény magasabb rendű, mint a nevezőben. Ezért egy kis nem kívánt, de szükséges "parazita" késleltetést (PT1 elem) adnak az ideális differenciáló átviteli függvényéhez, amelynek időállandójának lényegesen kisebbnek kell lennie, mint a differenciáló időállandója .
- Speciális szabályozók számos speciális alkalmazások, mint a többváltozós rendszerek , kaszkád vezérlés , vezérlési hurkok előtti kontroll és a pre-szűrő, vezérlési hurkok elővezérlés, folyamatvezérlés szerint kívánt pályára , többpontos kontroll , fuzzy vezérlés , az állami szabályozás a állam változók az állapottérben , digitális vezérlő . A jó vezérlési magatartás és a jó interferencia -elnyelés speciális vezérlőket igényel, mivel ellentmondó tulajdonságokra van szükség.



A lineárisan vezérelt rendszerek viselkedése:
- A másodfokú vezérlésű rendszerek (pl. Két PT1 elem soros csatlakoztatása vagy a PT1 elem + I elem) bármilyen nagy hurokerősítéssel működhetnek a vezérlőhurokban az instabilitás veszélye nélkül.
- A harmadfokú és magasabb rendű vezérlésű rendszerek csak stabil vezérlőhurokban működhetnek, nagyon korlátozott hurokerősítéssel.
- Három késleltető elemmel, amelyeknek a legrosszabb esete három egyenlő időállandó, az instabilitás határ esete a szabályozó P erősítésével K = 8, függetlenül az időállandó méretétől. Ez a viselkedés a Nyquist stabilitási kritériumával magyarázható .
- Egy magasabb fokú, esetleg holtidős viselkedésű szabályozott rendszer csak akkor vezérelhető stabil módon, ha a PT1 elemek egy részét a vezérlő PD1 elemei kompenzálják.
- Példa 4. fokú szabályozott rendszer holtidő elemmel:

- A monoton instabil szabályozott rendszerelem megfelelő vezérlővel stabil vezérlőhurokhoz vezethet.
- Példa egy monoton instabil szabályozott rendszerelemre:

- Egy tiszta holtidőből álló szabályozott rendszert csak - a speciális vezérlőktől eltekintve - egy I vezérlő vezérelhet.
- Ha az I szabályozó erősítését választja , akkor a túllépés minden holtidőben kb. Ü = 4%, ami kb. D = 0,7 csillapításnak felel meg .


A manipulált változók korlátozásának hatása:
Döntés kérdése, hogy a vezérlő kimeneti jele a hálózati interfésszel, mint manipulált változóval a vezérlő, a szabályozott rendszer vagy egy független eszköz része.
- Ha a vezérlőben differenciáló PD elemek vannak, akkor az erősítést egy dinamikus komponens is növeli. A manipulált változó nagyon nagy értékeket vehet fel. Ez a vezérlőhurok zárási feltételének ( jeláram -algebra ) kiszámításából adódik .
- A nagy hurokerősítés (a vezérlő és a rendszer P erősítése) dinamikusan gyorsítja a vezérlőhurkot, de a gyakorlatban csak korlátozott mértékben valósítható meg, mert a vezérlő manipulált változója nem nőhet a végtelenségig a műszaki leállások vagy az energiahiány miatt .
- A manipulált változóhatárokat gyakran adják meg, amikor P szabályozókat használnak; ezek lelassítják a szabályozott változó ülepedési viselkedését. A zavarok hatása kevésbé csökken.
- A vezérlő manipulált változójának korlátai a rendszer nemlinearitásához vezetnek. Az átviteli funkcióval rendelkező rendszer leírása ezért nem érvényes.
- A jelkorlátozások figyelmen kívül hagyhatók, és stabil vezérlőhurok érhető el. A szabályozott y ( t ) változó átmeneti viselkedése azonban jelkorlátozások esetén nem felel meg a vezérlőhurok átviteli funkciójának.
- Az alacsonyabb szabályozóerősítés a vezérlő egy időben integrált komponensével kapcsolatban pontosabbá és stabilabbá teszi a szabályozó hurkot minden statikus behatásra, ugyanakkor lassabb is.
- Az ellenőrzött rendszerré alakított vezérlőrendszert nem lehet gyorsabbá tenni energiaellátás nélkül.

Vezérlőhurok tervezési stratégiák lineáris időinvariáns rendszerekhez
A vezérlőhurok stabilitása lineáris időinvariáns átviteli rendszerekkel a rendszer sorrendjétől és paramétereitől, a szabályozó felépítésétől és a vezérlő paramétereitől - különösen a P erősítéstől - függ.


A lineáris rendszerek vezérlőhurkainak tervezési stratégiái a statikus szabályozási eltérés minimalizálására és a szabályozott változó ülepítési viselkedésére vonatkoznak. Például minél kisebb az időkésések száma és mérete a szabályozott rendszerben, annál nagyobb a hurokerősítés és ezáltal a vezérlő nyeresége is kiválasztható, ami javítja a szabályozott változó statikus és dinamikus pontosságát.
Ha a szabályozott rendszer mint lineáris időinvariáns átviteli rendszer leírása rendelkezésre áll termékábrázolásban, akkor viszonylag könnyen meghatározható a megfelelő vezérlő . A nyílt vezérlőhurok egyszerűsítése érdekében a rendszer domináns időállandójú PT1 elemeit lerövidítik a vezérlő PD1 elemeivel összehasonlítva (pólus nulla pont kompenzáció). Ez azt jelenti, hogy a nyitott hurok vezérlőhurok elemei azonos számértékekkel, a pólusok és nullák azonos előjelével már nem hatnak. A vezérlőhurok stabilitása érdekében 1 pólussal több szükséges, mint az átviteli funkción belüli nulla pozíció.



A vezérlőhurok lezárására szolgáló egyenlet segítségével a zárt vezérlőhurok átviteli függvényét polinomiális ábrázolásban kapjuk meg. A zárási feltétel nem vonatkozik a holtidővel rendelkező szabályozott rendszerekre.

A P vezérlővel ellátott vezérlőhurok és a másodfokú késleltetésű vezérlőrendszer átmeneti funkciója (a szabályozott változó lépésreakciója) a hurok erősítésének szintjétől függően elkerülhetetlen, időszakosan csillapított átmeneti választ okoz. Normál formája az átviteli függvény egy vibrációs elem: .

Ez az időszakosan csillapított átmeneti válasz még magasabb rendű vezérlőrendszereknél vagy csökkentett hurokerősítésű holtidő esetén sem változik, csak a késleltetési idő és az ülepedési idő nő. Természetesen az alacsony hurokerősítésű vezérlőhurkokhoz szükség van egy I komponensre, hogy elkerüljük a nagy szabályozási eltérést.
Ahhoz, hogy értékeli a tranziens válasz, a kifejezés kontroll minőségét definiált, amely meghatározza , hogy milyen típusú tranziens a vezérelt változó attól függően, hogy a specifikáció egy specifikáció .

A nem szabályos rendszerekkel rendelkező szabályozott rendszerek, mint például a monoton instabil PT1 i elem vagy instabil, két I elemű szabályozott rendszerek esetén a megfelelő vezérlővel ellátott zárt vezérlőhurok stabilizálódik a növekvő hurokerősítéssel . Ilyen rendszereknél ajánlott a vezérlőhurok stabilitását numerikus számítással ellenőrizni.


További tervezési kritériumok:
- Ha egy vezérlőrendszert lineáris időinvariáns rendszerek alkotnak egy vezérlővel kapcsolatban, hogy egy vezérlőhurkot képezzenek, akkor két előnye származik a vezérlőrendszer viselkedéséhez képest:
- A szabályozott változó az alapjel szintjéhez igazodik, a zavaró változók minimálisra csökkennek,
- A szabályozott változó domináns időállandója a rendszeréhez képest megközelítőleg a hurok erősítésének tényezője.
- A vezérlőhuroknak robusztusan kell viselkednie.
- A „robusztus” alatt azt értjük, hogy a vezérlő és a szabályozott rendszer paramétereinek fokozatos változása befolyásolja a vezérlőhurok dinamikáját. Ennek oka a belső és külső környezeti hatások. A paraméterek változásainak, mint például az öregedés, a súrlódás, a korrózió, a jóváhagyott tűréshatáron belül kell lenniük. A robusztussági viselkedést egy vezérlőhurok "belső zavarváltozóinak" hatásának is nevezik.
- Kompromisszum a vezérlő paraméterezésében:
- Egyedi esetekben mindig kompromisszumot kell kötni a megengedett manipulált változó korlátozás vagy a P erősítés csökkentése és az I komponens vezérlőbe történő beillesztése között, hogy a vezérlőhurok jó dinamikája legyen. A szabályozott változó ülepítési viselkedésének és az interferencia elnyomásának egyidejű javítása további intézkedéseket, például előszűrőt vagy elővezérlést igényel.
- A vezérlőhurok szimulációja a vezérlő paraméterezéséhez:
- A vezérlőhurok viselkedésének szimulálásához meg kell határozni a szabályozott rendszer matematikai modelljét. Erre a célra alkalmasak a kísérleti azonosító intézkedések ( kísérleti rendszer azonosítása ) tesztjelek segítségével .
- Csak a diszkrét idővel rendelkező numerikus számítási módszer alkalmas a jelkorlátozással és holtidővel kapcsolatos átviteli rendszerek időbeli viselkedésének kiszámítására .
A nemlineáris vezérlőkkel történő vezérlés áttekintése

Az energiatárolás nélküli lineáris rendszerekben a kimeneti változó arányos a bemeneti változóval. Az energiatároló lineáris időinvariáns ( LZI rendszer ) rendszerekben a kimeneti változó egyensúlyi állapotban arányos a bemeneti változóval. Az integrált viselkedésű rendszerekben (I-elem) a kimeneti változó arányos a bemeneti változó időintegráljával. A differenciáló viselkedésű rendszerekben (D elem) a kimeneti változó arányos a bemeneti változó differenciális hányadosával.
A kimeneti változóhoz kapcsolódó jelek matematikai műveletei, például:
- Az összeadások, kivonások, differenciálások, integrációk vagy szorzások a bemeneti jelek állandó tényezőjével lineáris viselkedést eredményeznek.
- A bemeneti mennyiségek szorzása és felosztása nemlineáris viselkedést eredményez.
Abban az esetben, a nem-lineáris átviteli rendszerek, legalább egy nem-lineáris függvény jár együtt lineáris rendszerek. A nemlineáris függvényeket folyamatos és nem folytonos nemlinearitásokra különböztetjük meg. A folyamatos nemlinearitás nem mutat ugrásokat az átviteli jellemzőben, mint pl B. másodfokú viselkedéssel. Az olyan megszakítás nélküli átviteli jellemzők, mint a korlátozások, hiszterézis, válaszérzékenység, kétpontos és többpontos karakter nem rendelkeznek folyamatos lefolyással.
A nemlineáris vezérlők olyan szakaszos vezérlőket is tartalmaznak, mint a kétpontos, többpontos és fuzzy vezérlők, amelyeket egy külön fejezet ismertet.
A nemlineáris rendszerek számítása többnyire az időtartományban történik. A nemlineáris differenciálegyenletek megoldása nehéz és időigényes. Ez különösen a nem folytonos nemlineáris átviteli viselkedésű vagy szakaszos vezérlőkkel rendelkező rendszerek csoportjára vonatkozik. Egy vezérlőhurok kiszámítása számítógépes, időfüggő folyamatokkal rendelkező kapcsolóvezérlőkkel egyszerűbb.
- → Lásd a Vezérlőhurok # Vezérlőtervezés fejezetet a lineáris időinvariáns rendszerekhez

Vezérlő tervezése pólusok kiosztásával az s-síkban
Az alábbiakban ismertetett tervezési folyamat abból áll, hogy egy zárt vezérlőhurok átviteli függvényének pólusait és nulláit a pólus-nulla diagram bizonyos területeihez rendeli (lásd még a pólus specifikációt az állapottérben) bizonyos minőségi követelmények meghatározása érdekében. Feltételezzük, hogy van egy domináns oszcillációs elem ( PT2 elem ), az esetleges további pólusok elég messze vannak a bal félsík domináns póluspárjától, és ezért kevés befolyással rendelkeznek.
A vezérlő feladata most a pólusok kijelölt pozíciójának teljesítése.
- → Lásd a Vezérlőhurok című fejezetet # Vezérlő tervezése pólus hozzárendeléssel az s-szinten
Vezérlő kialakítás inverz Laplace transzformációval
Ha egy lineáris dinamikus rendszer vagy egy zárt vezérlőhurok átviteli függvénye van megadva, akkor a kimeneti változó vagy a szabályozott változó lefolyása kiszámítható és grafikusan ábrázolható a Laplace inverz transzformáció segítségével, meghatározott bemeneti tesztjelekkel. Egy Laplace transzformációs táblázatot használunk, amely minden vezérléstechnikai szakkönyvben megtalálható, és amely az időtartomány megfelelő funkcióját képviseli az átviteli függvény termékábrázolásának számos formájához az s tartományban.
Egy dinamikus rendszer kimeneti változója az s tartományban:

Az időtartomány dinamikus y (t) rendszerének kimeneti változója az s tartománybeli átviteli rendszerhez:

Tesztjelek a rendszer válaszának kiszámításához:
Tesztjel Időtartomány f (t) Tesztjel az s tartományban A rendszer válasza f (t) Impulzus funkció Normalizált impulzus = Súly funkció Ugrás funkció Egység ugrás az Átmeneti funkció Lejtés funkció
Gradiens:Rámpa válasz








A dinamikus rendszer lépésválaszának (átmeneti függvényének) grafikus ábrázolása a rendszer időbeli viselkedésének leggyakrabban ismert ábrázolása. Ha a megfelelő időfüggvény megtalálható a Laplace megfelelési táblázatokban keresési kifejezésként, akkor az adott bemeneti jelre vonatkozó rendszer viselkedése grafikusan ábrázolható a t különböző értékeinek beillesztésével.
Megjegyzés: Az inverz Laplace -transzformáció alkalmazása sok számítási munkát igényel trigonometrikus és exponenciális függvényekkel csillapított oszcilláló rendszerekben.
→ Lásd a számítási példát is, a vezérlőhurok # vezérlő kialakítását inverz Laplace transzformációval
Digitális vezérlés (áttekintés)
Mind az analóg, mind a digitális vezérlők megkövetelik a vezérlési eltérést és egy vezérlőalgoritmust , amely bemeneti jelként meghatározza a zárt vezérlőhurok kívánt dinamikáját.
A diszkrét idejű lineáris dinamikus rendszereket az jellemzi, hogy a belső rendszerállapotokat csak egyes időpontokban határozzák meg, és a be- és kimeneteken diszkrét idejű jelek fordulnak elő.
A legtöbb vezérlőrendszerben a szabályozott rendszerek folyamatosan működő analóg, egyváltozós rendszerek , amelyek lineárisan, nemlineárisan és holtidővel viselkedhetnek . Ezeknek a szabályozott rendszereknek bizonyos fizikai mennyiségeket, például hőmérsékletet, erőt, nyomást, sebességet, szintet stb. Kell szabályozni. Az ehhez szükséges vezérlők analóg vagy digitális rendszerstruktúrával rendelkezhetnek, és a kimeneten analóg, folyamatosan működő változót tartalmazhatnak.
A digitális vezérlés azt jelenti, hogy egy vezérlő vagy egy alrendszer bemeneti jelét bizonyos időpontokban mintavételezik, szinkronban számítják ki, és digitális kimeneti jelként adják ki. Más kifejezések ezt az eljárást "idődiszkrét vezérlésnek" vagy "mintavételi ellenőrzésnek" nevezik.
A matematikában a véges és végtelen számú egymást követő számozású objektumok listáját (itt mintavételezett számértékek) sorozatnak nevezzük . A szkennelési sorozat a rendszer bemeneti jelének (bemeneti sorrend) és a kimeneti jel (kimeneti sorrend) értékszekvenciájának következő elemeinek számozását jelenti.

Egy értéksor egy vagy több nyomon követési elemből áll.


A digitális vezérlő nem korlátozza a követési számot a szkennelési sorozatban. Vezérlés esetén végtelen számú követési elemet hajtanak végre a mintavételi idő közötti valós időintervallumban .


A digitális számítógép számítási algoritmusa nem teszi lehetővé az analóg időfüggő jelek folyamatos számítását. Ezért az analóg bemeneti jelek, z. B. az eltérés e (t) = w (t) - y (t), segítségével egy (ideális) mintavevőt és egy A / D átalakítót , mint a mintában. A digitális vezérlő kívánt rendszerátviteli viselkedését az adott bemeneti sorrendre differenciálegyenletekkel számítják ki, és szinkronban adják ki, mint digitális kimeneti jelet numerikus értékekkel.


Ha analóg kimeneti jelre van szükség manipulált változóként egy analóg, folyamatosan működő, vezérelt rendszerhez, akkor a D / A konverterrel ellátott, hardver funkcióval (tartóelemmel) rendelkező speciális hardver lehetővé teszi az átalakítást lépcsős, kvázi folyamatos kimenő jellé u (t ), mint a vezérlő manipulált változója.
Gyorsan vezérelt rendszerek esetében a digitális számítógép, az A / DD / A konverter, a mintavétel és tartás áramköre, valamint a differenciálegyenletekhez használt módszerek vagy azok közelítő algoritmusai játszanak nagy szerepet .
A digitális vezérlők technikai előnyei a következők: egyszeri hardverfejlesztési erőfeszítések, egyszerű paraméteres rendszerváltoztatások szoftver segítségével, bonyolultabb vezérlőstruktúrák megvalósítása, multitasking .

Az állami ellenőrzés alapjai
Az állapotvezérlő nem független vezérlő, de megfelel az ellenőrzött rendszer matematikai modelljének állapotváltozóinak visszacsatolásához az állapottérben, tényezőkkel értékelve.
Az állapotvezérlő (más néven statikus állapotvisszacsatolás) alapelve az átviteli rendszer kiértékelt belső rendszerváltozóinak visszajelzése egy vezérlőhurokhoz. Az egyes állapotváltozókat tényezőkkel értékelik , és kivonják a w (t) referenciaváltozót.


Ily módon az állapotváltozók egyes részei a normál vezérlőforma jeláramlási diagramjának megfelelően másodszor is átfutnak a számítási áramkör integrációs láncolatán. Az eredmény egy állapotvezérlő, amely PD viselkedést mutat az állapotvezérlő hurokban.
A szabványos vezérlőhurokkal ellentétben az állapotvezérlő hurok y (t) kimeneti változója nem kerül vissza a szabályozott rendszer bemenetére. Ennek az az oka, hogy az y (t) kimeneti változó az állapotváltozók függvénye. Mindazonáltal elfogadhatatlan arányos hiba léphet fel a w (t) referenciaváltozó és az y (t) szabályozott változó értékei között, amelyet ki kell küszöbölni egy V előszűrővel.
A vezérlőállapot -visszacsatolás (az állapotváltozók visszacsatolásának megkülönböztetésére) az állapotvektorra vonatkozik , amelyet az állapotvezérlő hurok modelljének jeláramlási diagramja szerint vektor -erősítéssel viszünk vissza a bemeneti változóba :



A lineáris állapotvezérlő tényezőkkel értékeli a szabályozott rendszer egyes állapotváltozóit, és a kapott állapottermékeket hozzáadja a cél / tényleges érték összehasonlításhoz.
A vezérlési eltérés elkerülésének alternatívája az állapotvezérlő hurok egymásra helyezett vezérlőhurokja PI vezérlővel az y (t) szabályozott változó visszacsatolásával, ami feleslegessé teszi az V előszűrőt.
Homályos vezérlő

A fuzzy vezérlők a fuzzy vezérlő eljárására utalnak, de többnyire funkcionális módosítások, egyszerűsítések vagy kiegészítések a fuzzy logikával.
Rendszer-analitikai értelemben a fuzzy vezérlőrendszer egy statikus, nem lineáris vezérlőrendszer, amely egy összetett folyamat éles bemeneti változóit használja a szabályalap szabályai szerint, hogy fuzzifikált vezérlőváltozókat és éles, defuzzifikált értékjeleket hozzon létre amely kielégítő folyamat eredményt ér el.
A fuzzy vezérlők úgynevezett "nyelvi változókkal" dolgoznak, amelyek "fuzzy mennyiségekre" utalnak, például magas, közepes és alacsony értékekre. A "szabályalap" összekapcsolja az elmosódott bemeneti és kimeneti jeleket olyan logikai szabályokkal, mint az IF és az THEN rész. A légtelenítéssel a homályos mennyiséget vissza kell alakítani pontos vezérlőparancsokká (pl. Szelepkombinációk az „erő növelésére” vagy „az erő csökkentésére” vagy „tartási erőre”).
Egy grafikus fuzzy modell egy fuzzy változót mutat skálázott alaphalmazként (pl. Hőmérsékleti tartomány), amelynek többnyire háromszög alakú részhalmazai (fuzzy halmazok) egy koordinátarendszer abszcisszáján vannak elosztva, többnyire átfedésben. Az ordinátus a bemeneti változó minden éles értékéhez mutatja a tagság mértékét. A tagsági fok maximális értéke minden fuzzy halmaznál μ = 1 ≡ 100%.
Folyamatos szabályozó

Folyamatos vezérlők esetén (beleértve a szakaszos vezérlőket is) az u (t) kimeneti változó lépcsőzetes. Egy egyszerű kétállású vezérlő esetén a szabályozó kimeneti változója - az u (t) manipulált változó - csak 2 diszkrét állapotot feltételezhet: Ha az e (t) = w (t) - y (t) szabályozási eltérés pozitív , a kétállású szabályozó bekapcsol, és nulla vagy negatív, a szabályozó kikapcsol. Ha a szabályozó szimmetrikus hiszterézissel rendelkezik, akkor a szabályozás eltérésének mindig kis mennyiségű negatívnak kell lennie, hogy a szabályozó kikapcsoljon, és ugyanolyan kis mennyiségnek pozitívnak kell lennie, hogy a vezérlő bekapcsoljon.
A „Be” vagy „Ki” kimeneti jelállapotú megszakított vezérlők arányos viselkedést is mutathatnak, ha egy klasszikus szabványos vezérlő kimeneti változóját impulzus időtartam -modulátorral látják el . A szabályozott rendszer aluláteresztőként működik az impulzusjelek kiegyenlítése érdekében . Ennek a folyamatnak a célja a nagy energiaáramok szabályozása a lehető legkisebb veszteséggel.
Az elektromos és elektronikus kapcsolóelemek, például relék, kontaktorok , tranzisztorok és tirisztorok használata során a lehető legalacsonyabb kapcsolási frekvencia kívánatos, hogy minimálisra csökkentsük az alkatrészek kopását és elöregedését. Az elektronikus alkatrészek is elöregednek, ha magas belső hőmérsékleten működnek. Másrészt az alacsony kapcsolási frekvencia a szabályozott változó jelének hullámzásának növekedését jelenti.
A kapcsolási folyamatok meredek impulzus élek által okozott elektromágneses interferenciája miatt megfelelő interferencia -elhárítási intézkedéseket kell biztosítani. (Lásd elektromágneses kompatibilitás )
A lineáris átviteli rendszerekhez hasonlóan a megszakított vezérlőkkel ellátott vezérlőhurok stabilitása is érdekes.
A megszakítás nélküli vezérlő tervezéséhez, elemzéséhez és optimalizálásához a vezérlőhurok -modellben a leghatékonyabb számítási módszer numerikus módon érhető el kereskedelmi számítógépes programok, például a MATLAB vagy a Simulink használatával.
Ha ilyen számítógépes programok nem állnak rendelkezésre, bármely kívánt rendszer és vezérlőhurok folyamatos, szakaszos, nemlineáris és lineáris elemekkel számszerűen kiszámítható Δt időtartamig bármely számítógépes programmal - lehetőleg táblázatkezelővel - a logikai egyenletek és differenciálegyenletek . A teszt bemeneti jelhez tartozó vezérlőhurok jeleinek viselkedése közvetlenül megjeleníthető táblázatokban és grafikonokban.
lásd a "Szakadatlan vezérlők" fő fejezetet Vezérlő # Folyamatos vezérlők
stabilitás
A stabilitásnak különböző definíciói és feltételei vannak. Az átviteli rendszer lehet monoton vagy oszcilláló instabil. A helytelenül méretezett vezérlő oszcillációs instabilitást okozhat a vezérlőhurokban.
A stabilitási módszerről lásd: Vezérlőhurok # Stabilitás
A vezérelt rendszerek matematikai modelljei
Általánosságban elmondható, hogy a modellek leírják a dinamikus rendszerek időbeli viselkedését. A fizikai anyagmodelleken kívül (példa: kísérleti információgyűjtés a jármű áramlási viselkedéséről szélcsatornában, modellhajók hidraulikus csatornában), amelyek bonyolultak és drágák, a matematikai rendszerleírások különösen alkalmasak a folyamatszimuláció alkalmazására digitális számítógépeken.
A folyamatszimuláció előnyei ismertek, a paraméterek megváltoztatása széles határok között lehetséges, roncsolásmentes vizsgálatok lehetségesek, viszonylag alacsony személyi költségek,
Az elméleti, analitikai és kísérleti modellek módszerei eltérőek a modellek generálásakor.
A modellek ismereteinek teljességétől függően a következő modellkifejezéseket is használják:
- A fekete dobozos modellek ismeretlen rendszerek, a bemeneti és kimeneti változók típusa ismert.
- A szürke dobozos modellek többnyire olyan rendszereket írnak le, amelyek szerkezete ismert.
- Egyszerű példa: ellenőrzött rendszer holtidővel, globális I viselkedéssel és a manipulált változó limit stopjával.
- A fehér doboz modellek többnyire olyan rendszereket írnak le, amelyek matematikai viselkedése ismert, és amelyek paramétereit még meg kell határozni.
A valódi átviteli rendszerek ( szabályozott rendszerek ) elemzéséhez, szintéziséhez és szabályozásához , amelyek általában hardverrendszerként vannak jelen, a rendszer matematikai modellje szükséges.
A modellek differenciálegyenletek formájában írják le a rendszer viselkedését az idő múlásával. Ha ezeket a differenciálegyenleteket vagy a hozzájuk tartozó átviteli függvényeket nem adjuk meg, a hardverrendszer időbeli viselkedését kísérleti azonosító intézkedésekkel ( kísérleti rendszer azonosítása ) lehet meghatározni tesztjelek segítségével .
Az alapeljárásban a modellparaméterek azonosítási algoritmusát addig változtatják, amíg az y (t) - y modell (t) kimeneti változók közötti különbség egy adott u (t) bemeneti jelhez hozzávetőleg eltűnik a mért eredeti bármely időbeli sorrendjében kimenet a modell kimenetével.
A dinamikus rendszerek koncentrált paraméterekkel, mint egyváltozós és többváltozós rendszerek lineárisan, nemlineárisan, időinvariáns, időváltozatos és globálisan arányos, integrált és differenciális viselkedést mutathatnak. Ellentétben az elosztott paraméterekkel rendelkező rendszerekkel (hőáramlás homogén közegben), a koncentrált paraméterekkel rendelkező rendszerek (rugótömegű rendszer) nem rendelkeznek térbeli tágulással.
A valódi dinamikus folyamat matematikai modelljének vagy a még konfigurálásra váró technikai folyamatnak a feladata a rendszer viselkedésének azonosítása és előrejelzése.
A vezérlőhurok matematikai modellje leír minden külső befolyásoló változót, például a zavarváltozókat és a bemeneti jeleket a vezérlőhurok zárt működési sorrendjében. Különösen érdekes a kimeneti változók, például a szabályozott változók, valamint az érdekes köztes változók (manipulált változók) viselkedése a bemeneti jelek, valamint a vezérlő és a szabályozott rendszer paramétereinek függvényében.
A vezérléstechnikai feladat specifikációitól függően a szabályozott rendszer matematikai modellje szükséges a megfelelő vezérlő kiválasztásához.
A legtöbb alkalmazásban az átviteli rendszerek (vezérelt rendszerek) nemlineáris komponensekkel is rendelkeznek, és holtidőnek vannak kitéve. Az ilyen rendszerek esetében a rendszer válaszát kísérletileg rögzítik megfelelő tesztjelek segítségével, és olyan matematikai modellt keresnek, amely reprodukálja a kimeneti változó mért menetét ( = kísérleti folyamat elemzése ). Az így definiált modell könnyen kiszámítható numerikus módszerekkel. Ha a teljes rendszer nemlineáris alrendszereket tartalmaz, ezeket külön kell rögzíteni, és érték táblázatok segítségével kell meghatározni.
- A globálisan arányos, időinvariáns, magasabb rendű, holtidővel vezérelt rendszerek viszonylag pontosan leírhatók két PT1 elemmel és egy Tt elemmel.

Ha a holtidő elem transzcendens függvényének a számítógépes programmal való ábrázolása problémákat okoz, akkor a bemutatott modell -egyenlet gyakorlatilag azonos lehet egy nagyon jó közelítéssel is, z egyenértékű holtidővel. B. n = 3 PT1 elem a következőképpen ábrázolható:

- A globálisan integrált időinvariáns vezérlésű rendszereket két PT1 elem, egy I és egy Tt elem is leírhatja.

A dinamikus rendszer modelljének megértéséhez meg kell érteni a belső rendszermemória legfontosabb feltételeit.
Egy ellenőrzött rendszer kísérleti azonosítása modellvezérelt rendszer segítségével
Egy valódi szabályozott rendszer azonosítható a szabályozott rendszer lépésreakciójával, a szabályozott rendszer impulzusválaszával vagy változó frekvenciájú táplálással.

A modell által vezérelt rendszer legfontosabb jellemzői a lépés vagy impulzusválasz segítségével:
- A szabályozott rendszer paraméterei egy egyszerű modellvezérelt rendszer segítségével határozhatók meg úgy, hogy a modell jellemzőit az ismeretlen szabályozott rendszer jellemzőihez igazítják, a modell időállandóit lépésről lépésre megváltoztatva.
- A modellnek hasonló rendszertulajdonságokkal kell rendelkeznie, mint az ismeretlen szabályozott rendszernek.
- Kompenzáció nélküli útvonalak esetén a modellhez I komponens szükséges, holtidővel rendelkező útvonalak esetén holtidő elem is szükséges a modellhez.
- A modell adaptálása az ismeretlen szabályozott rendszerhez a lépésválasz segítségével viszonylag egyszerű, és esetleg grafikusan is végrehajtható.
- Egy modell adaptálása az ismeretlen szabályozott rendszerhez az impulzusválasz segítségével valamivel összetettebb, de ha a jellemzők egybevágnak, akkor teljes megfeleltetést biztosít az eredeti és a modell között egy vezérlőhurokban a megfelelő lépésválaszokhoz képest . Ez a modell használható az eredeti sorrendjének meghatározására is.
- Könnyűnek kell lennie.
Lásd a fő cikket Vezérelt rendszer # Egy vezérelt rendszer kísérleti azonosítása modellvezérelt rendszer segítségével
Heurisztikus beállítási szabályok az egyszerű szabályozásokhoz

A Ziegler-Nichols által az 1940-es években már kísérletileg végrehajtott beállítási szabályok egy szabályozott rendszer lépésreakciójára vonatkoznak, és úgy határozzák meg, mint egy PT1 elemmel és egy holtidő elemmel rendelkező rendszert, az érintőpont létrehozásával a fordulópontban. 1952 -ben Chien, Hrones és Reswick kibővítették a beállítási szabályokat (hüvelykujjszabály (automatizálási technológia) ) a szabályozott változó lépésválaszainak aperiodikus viselkedésére és a csillapított oszcilláló viselkedésre 20% -os túllépéssel. Ezenkívül mindkét csoport vezetői magatartásra és zavaró viselkedésre oszlik. Ezeket a beállítási szabályokat néha hüvelykujjszabályoknak is nevezik.
A negyedik rendű rendszer a következő átviteli funkcióval rendelkezik:

Amikor az érintőt a megadott átviteli függvény átmeneti függvényére alkalmazzák, a következő jellemző értékeket kapjuk:
- A csere holtideje:
- Ekvivalens időállandó:


Ezeknél a jellemző értékeknél a lineáris szabványos vezérlő paramétereit táblázatok határozzák meg. Ezekből a jellemző értékekből nem határozható meg helyettesítő átviteli függvény. Az így meghatározott vezérlőparaméterek minősége kedvezőtlen.
A fenti átviteli függvény nagyon pontos modelljének ekvivalens átviteli függvénye szimuláció segítségével numerikus számítással:

Lásd még: vezérelt rendszer # Egy vezérelt rendszer kísérleti azonosítása modellvezérelt rendszer segítségével .
A vezérlőrendszer specifikációi
Az igényes vezérléshez - a tesztelési eljáráson túl - a vezérlőrendszer meghatározásához a vezérlőhurok viselkedésére vonatkozó specifikációs lap szükséges.
A következő ismeretek szükségesek a szabályozott rendszer vagy modell tulajdonságairól:
- Vannak -e jelkorlátozások az átviteli rendszerben, pl. B. ha a vezérlő szükséges, eszközhöz kapcsolódó manipulált változóeszközét tartalmazza a szabályozott rendszerben
- Van -e holtidő a rendszerben?
- Rendelkezik -e a szabályozott rendszer stabil határértékű összetevőkkel (I elemek)
- Tartalmaz -e az erőátviteli rendszer csillapított oszcilláló alkatrészeket, azaz H. összetett pólusok konjugálása?
- Az LZI rendszerek mellett vannak nemlineáris komponensek (nem lineáris jelleggörbe) az átviteli rendszerben
- Ha az átviteli rendszer instabil alkatrészeket tartalmaz, pl. H. a szabályozott rendszer instabil?
- Ha a vezérelt rendszer több bemeneti és kimeneti változóval rendelkezik, pl. H. Egyhurkos rendszer (SISO) vagy többváltozós rendszer (MIMO).
A következő leírás szükséges a jelekről és a szabályozott változó működéséről a vezérlőhurokban:
- A szabályozott változó alapjelre történő beállításának nagy és kicsi jelviselkedése.
- Megjegyzés: A nagy jelű viselkedést zavarják a jel korlátozásai a nyitott vezérlőhurokban!
- A szabályozott változó átmeneti válaszának típusa,
- Minőségi kritériumok: aszimptotikus, túllépés, csillapítás, túllépés, emelkedési és letelepedési idő, egyensúlyi állapotbeli eltérés, hosszú távú tolerancia
- A zavar hatása, típusa és támadási pontja pl. B. a vezérelt rendszer bemenetén vagy kimenetén
- A szabályozott változó nyomon követési viselkedése egy meghatározott referenciaváltozó szerint
- A menedzsment vagy a zavaró viselkedés optimalizálása
- A szabályozott rendszer hozzávetőleges modellje elegendő
- Szükséges -e speciális vezérlő egy adott szabályozott rendszerhez, pl. B. A zavarváltozó kompenzálása, a holtidő kompenzálása, előzetes ellenőrzések a következményes hibák elkerülése érdekében, többváltozós rendszerek vezérlői,
- A hardver belső zavarváltozóinak milyen hatása (az alkatrészek korfüggő hatása, sodródás, hiszterézis, súrlódási hatások stb.) Megengedett a teljes vezérlőrendszerben.
Az irányítástechnikához kapcsolódó szakmai egyesületek
Németország:
Nemzetközi:
Lásd még
- Kontrollelmélet
- Irányítás a területen
- Hüvelykujj -eljárás (automatizálási technológia)
- Modell prediktív vezérlés
- Hibatűrő szabályrendszer
- Adaptív vezérlés
- Optimális szabályozás
- automatizálás
irodalom
- Adolf Leonhard : Az automatikus vezérlés az elektrotechnikában. J. Springer, Berlin 1940.
- Adolf Leonhard : Az automatikus szabályozás. Elméleti alapok gyakorlati példákkal. Springer, Berlin; Göttingen; Heidelberg 1949, 2. kiadás 1957, 3. kiadás 1962, ISBN 978-3-642-92841-3 .
- Föllinger Ottó : Vezérléstechnika . Hüthig Verlag, ISBN 3-7785-2336-8 .
- Martin Horn, Nicolaos Dourdoumas: Vezérléstechnika . Pearson Studies, 2006, ISBN 3-8273-7260-7 .
- Ulrich Korn , Ulrich Jumar : PI többváltozós vezérlő - praktikus kialakítás, robusztusság, alkalmazás. Oldenbourg Verlag, München, Bécs 1991, ISBN 3-486-21720-8 .
- Rolf Isermann : Dinamikus rendszerek azonosítása . szalag 1. és 2. Springer Verlag, 1992, ISBN 3-540-55468-8 .
- Lennart Ljung: Rendszerazonosítás - elmélet a felhasználó számára . Prentice Hall, ISBN 0-13-656695-2 .
- Jan Lunze : Vezérléstechnika 1 . 6. kiadás. Springer Verlag, Berlin 2007, ISBN 978-3-540-70790-5 . Vezérléstechnika 2 . 4. kiadás. Springer Verlag, Berlin 2006, ISBN 978-3-540-32335-8 .
- Holger Lutz, Wolfgang Wendt: A vezérléstechnika zsebkönyve a MATLAB és a Simulink segítségével . 12. kiadás. Verlag Europa-Lehrmittel, 2021, ISBN 978-3-8085-5870-6 .
- Heinz Mann, Horst Schiffelgen, Rainer Froriep,: Bevezetés a vezérléstechnikába . Carl Hanser Verlag, München 2009, ISBN 978-3-446-41765-6 .
- Winfried Oppelt : A technikai vezérlési folyamatok kis kézikönyve . 5. kiadás. Verlag Chemie, Weinheim 1972, ISBN 3-527-25347-5 .
- Kurt Reinschke : Lineáris szabályozás és szabályozás elmélete . Springer Verlag, Drezda 2005, ISBN 3-540-21886-6 .
- Gerd Schulz: Vezérléstechnika . Oldenbourg Verlag, 2002, ISBN 3-486-25858-3 .
- Karl-Dieter Tieste: Ne essen pánikba a vezérléstechnika miatt . Vieweg Verlag, 2011, ISBN 978-3-8348-0850-9 .
- Heinz Unbehauen : Vezérléstechnika . szalag 1 . Vieweg Verlag, Braunschweig 2005, ISBN 3-528-93332-1 .
- Heinz Unbehauen: Vezérléstechnika . szalag 2 . Vieweg Verlag, Braunschweig 2000, ISBN 3-528-73348-9 .
- Heinz Unbehauen: Vezérléstechnika . szalag 3 . Vieweg Verlag, Braunschweig 2011, ISBN 978-3-8348-1419-7 .
- Josef Uphaus: Vezérléstechnika . Bildungsverlag Eins, 2005, ISBN 3-427-44510-0 .
- samson.de (szerk.): Az irányítástechnika fogalmai és szimbólumai . ( samson.de [PDF]).
- Jürgen Adamy: Nemlineáris szabályozás . Springer Verlag, Berlin 2009, ISBN 978-3-642-00793-4 .
- Werner Kriesel , Hans Rohr, Andreas Koch: A mérési és automatizálási technológia története és jövője. VDI-Verlag, Düsseldorf 1995, ISBN 3-18-150047-X .
- Erwin Samal, Dirk Fabian, Christian Spieker: A gyakorlati vezérléstechnika vázlata . Oldenbourg Verlag, 2013, ISBN 3-486-71290-X .
- Jörg Lange, Tatjana Lange : Fourier -transzformáció a jel- és rendszerleíráshoz. Kompakt, vizuális, intuitív módon érthető. Springer Vieweg 2019, ISBN 978-3-658-24849-9 .
Folyóiratok és folyóiratok:
- VDI / VDE -GMA, NAMUR [folyamatirányítási technológia érdekcsoport a vegyiparban és a gyógyszeriparban] (szerk.): At - automatizálási technológia . Oldenbourg Wissenschaftsverlag ( at-technik.de - 1953 óta havonta).
- atp - automatizálási technológiai gyakorlat . Oldenbourg Wissenschaftsverlag, ISSN 0178-2320 .
- atpi - Automatizálási technológia a gyakorlatban . Oldenbourg Wissenschaftsverlag (angol, oldenbourg-industrieverlag.de ).
- MSR magazin. Napló méréshez, vezérléshez, szabályozáshoz . Verlag für Technik & Wirtschaft VTW ( industrie-service.de ).
- International Journal of Control . Taylor & Francis (angol, tandf.co.uk ).
- IFAC (szerk.): Automatika . Elsevier (angol, elsevier.com ).
- European Journal of Control . Elsevier (angol, elsevier.com ).
- Mérnöki és Technológiai Intézet [IET] (szerk.): IEE Proceedings - Control Theory & Applications . (Angolul, ietdl.org ).
- Norwegian Society of Automatic Control (szerk.): Modeling, Identification and Control . (Angolul, itk.ntnu.no ).
- Wroclawi Műszaki Egyetem (szerk.): Rendszertudomány . (Angol, Wroclaw UT ).
- IEEE Control Systems Society [CSS] (szerk.): IEEE Control Systems Magazine . (Angol, web ).
- IEEE Control Systems Society (szerk.): IEEE Transactions on Automatic Control . (Angolul, ieeexplore.ieee.org ).
- IEEE Control Systems Society (szerk.): IEEE Transactions on Control Systems Technology . (Angolul, ieeexplore.ieee.org ).
- ASME American Society of Mechanical Engineers (szerk.): Journal of Dynamic Systems, Measurement, and Control . (Angolul, scitation.aip.org ).
web Linkek
- Ellenőrző intézetek Németországban ( Memento 2016. január 2 -tól az Internet Archívumban )
- Robothálózat -vezérlő technológia
Egyéni bizonyíték
- ↑ Jürgen Müller: Szabályok a SIMATIC -nal . Publicis Corporate Publishing, Erlangen 2004, ISBN 3-89578-248-3 .
- ↑ Manfred Schleicher: Vezérléstechnika a gyakorló számára . JUMO GmbH & Co, 2006, ISBN 3-935742-00-2 .
- ↑ Berthold Heinrich (szerk.): Mérés, ellenőrzés, szabályozás . Vieweg Verlag, Wiesbaden 2005, ISBN 3-8348-0006-6 .
- ↑ a b Hans-Joachim Zander: Az eseménydiszkrét folyamatok szabályozása. A folyamatleírás és a vezérlőalgoritmusok tervezésének új módszerei . Springer Vieweg, Wiesbaden 2015, ISBN 978-3-658-01381-3 (323 oldal).
- ↑ Hans-Peter Brill: Minőségirányítás szoftverprojektekhez: 10 legismertebb szoftverhiba. In: XING. 2007. november 15., hozzáférés: 2019. július 22 .
- ↑ A Boeing elismer egy újabb szoftverproblémát. In: Spiegel Online. 2019. április 5. Letöltve: 2019. július 22 .
- ↑ Ingo Pinter: Robbanásvédelem pneumatikával az elektromos eszközök alternatívájaként. In: Vegyészmérnökség. 2010. július 22. Letöltve: 2019. július 29 .
- ↑ Klasszikus Honeywell kerek termosztát leépítés. (Videó; 15:46 perc) In: youtube. 2016. december 4., hozzáférés 2019. augusztus 1 -jén (angolul, bomlás és a funkcionális elv magyarázata).
- ↑ Jan Lunze : Vezérléstechnika. 2. rész: Többváltozós rendszerek, digitális vezérlés. 9. kiadás. Springer Vieweg, Berlin 2016, ISBN 978-3-662-52675-0 (720 oldal).
- ↑ A Süddeutsche Zeitung 2013. február 4-i újságcikkében, a "Tudás" alatt a Szövetségi Környezetvédelmi Ügynökség, az "Initiative Wärme +" társaság és a félig állami "Deutsche Energieagentur" különböző nézeteit említik a fűtés megtakarításával kapcsolatban. költségeit a szobahőmérséklet csökkentésével, ha nincs. Eredmény: A jól szigetelt házban a rövid távú szobahőmérséklet-csökkentés révén az energiamegtakarítás jóval alacsonyabb, mint egy kevésbé jó szigetelésű "régi épületben". Ha legfeljebb két napig távol van, hasznos lehet a hőmérséklet 18 ° C -ra csökkentése. Továbbá, ha a süllyedés nagyobb, fennáll annak a veszélye, hogy a levegő páratartalma lecsapódik penészgombával.
- ↑ May-Britt Kallenrode, Osnabrücki Egyetem, Fizika Tanszék: Előadás kézirata „Matematika fizikusoknak”, fejezet: „Differenciálegyenletek”, 2007.
- ↑ Szerző: Jan Lunze / Control Engineering 1; Fejezet: Holtidő -rendszerek: Részlet: "A holtidő -rendszerek nem írhatók le az állapottér -modell standard felépítési diagramjával."
- ↑ A szakirodalomban és az egyetemek előadás -kézirataiban nincsenek szabványosított kifejezések a jellemző értékekre. Ezért szakkönyvek szerzői alapján: Holger Lutz, Wolfgang Wendt / Pocket Book of Control Engineering: Fejezet: Az idő és a frekvencia tartomány paramétereinek kapcsolata.
- ↑ Lutz / Wendt: A vezérléstechnika zsebkönyve, fejezet: Vezérlés állapotvisszajelzéssel .